Investigación e implementación de tecnología de enfoque automático de lentes infrarrojas basada en una matriz de puertas programables en campo
- participación
- Tiempo de Publicación
- 2021/11/19
Resumen
En vista de las características generales del ruido marginal vertical y el ruido aleatorio en imágenes infrarrojas, este artículo mejora y optimiza el algoritmo de evaluación de la nitidez infrarroja y el algoritmo de escalada en el proceso de enfoque.

La tecnología de enfoque automático juega un papel importante en el campo de la monitorización de imágenes térmicas infrarrojas. En la actualidad, existen algunos problemas con la tecnología de enfoque automático por infrarrojos, como una baja tasa de éxito, una arquitectura compleja y una baja velocidad de enfoque. Por lo tanto, este estudio propone una tecnología de enfoque automático de lentes infrarrojas basada en FPGA, que realiza las funciones de procesamiento, visualización y enfoque automático de imágenes infrarrojas con una sola FPGA.
En vista de las características comunes del ruido de franja vertical y el ruido aleatorio en imágenes infrarrojas, este estudio mejora y optimiza el algoritmo de evaluación de la definición de infrarrojos y el algoritmo de escalada en el proceso de enfoque. Los resultados experimentales muestran que el algoritmo y el método de implementación propuestos en este estudio pueden ayudar notablemente a enfocar la lente infrarroja. Mientras tanto, el método propuesto tiene características tales como alta integración, rápida velocidad de enfoque y alta tasa de éxito y, por lo tanto, tiene amplias perspectivas de aplicación.
La tecnología de imágenes térmicas infrarrojas se ha utilizado ampliamente en la defensa nacional, la guerra, la detección, el monitoreo y otros campos en los últimos años. Para los monitores de imágenes térmicas utilizados en las defensas fronterizas y costeras, la plataforma giratoria de infrarrojos necesita un período fijo de rotación y posicionamiento durante el uso para lograr el propósito de patrullar. Cada vez que gira a una nueva posición, es necesario reenfocarlo para obtener una visualización de imagen clara. Por lo tanto, la función de enfoque automático de la cámara termográfica infrarroja puede facilitar enormemente la observación y el uso por parte del operador.
En comparación con la tecnología de imágenes de luz blanca visible, la tecnología de imágenes infrarrojas realiza imágenes del objeto observado basándose en el calentamiento del propio objeto observado. Dado que su principio de obtención de imágenes es incompatible con el principio de obtención de imágenes de luz blanca visible, la tecnología de imágenes infrarrojas y la tecnología de imágenes de luz blanca tienen un cierto grado de realización. La diferencia. La tecnología de enfoque automático basada en imágenes ha alcanzado una gran madurez en el procesamiento de imágenes con luz blanca. En la literatura [1] y la literatura [2], el autor utiliza PC y FPGA para completar el enfoque automático de la lente en función de imágenes de luz blanca visible, respectivamente.
En aplicaciones prácticas, el rendimiento del generador de imágenes de detección de infrarrojos se ve afectado por muchos factores, como detectores de infrarrojos, circuitos de conversión de analógico a digital, disipación de calor estructural y lentes ópticas. La tecnología tradicional de enfoque automático de imágenes de luz blanca tiene un efecto deficiente en el enfoque automático de imágenes infrarrojas. Por tanto, es necesario proponer una tecnología de autoenfoque basada en las características de la propia imagen infrarroja (fenómeno de rayas verticales, ruido excesivo, etc.).
Este artículo propone una tecnología de enfoque automático de lentes infrarrojas basada en FPGA. En comparación con la literatura [3], mejora el algoritmo de evaluación de la calidad de la imagen para las características de las franjas verticales en la imagen infrarroja. En comparación con la literatura [4], la imagen infrarroja tiene ruido. Funciones Optimice el algoritmo de subida de pendientes para lograr el control de la lente.
En comparación con la literatura [5], este artículo no depende de la participación de la computadora host. Está completamente implementado por la propia FPGA para lograr la adquisición de imágenes, optimización de imágenes, evaluación de definición de imágenes, implementación de algoritmos de escalada, control de motores, etc. En el trabajo, mejora enormemente la integración de toda la cámara termográfica.
1. La composición de la cámara termográfica y el principio de enfoque automático.
1.1 Composición de la cámara termográfica
La cámara termográfica con la función de enfoque automático propuesta en este artículo se muestra en la Figura 1. Los componentes principales incluyen la lente infrarroja, un detector de infrarrojos, un circuito de procesamiento de imágenes, un circuito FPGA, DDR3, un circuito de accionamiento del motor, un motor de enfoque y un mecanismo de enfoque. (engranaje mecánico).

Fig.1 Cámara termográfica infrarroja con enfoque automático
1.2 El principio de funcionamiento de la cámara termográfica y el principio de funcionamiento del enfoque automático.
La arquitectura principal de la cámara termográfica infrarroja se muestra en la Figura 2.
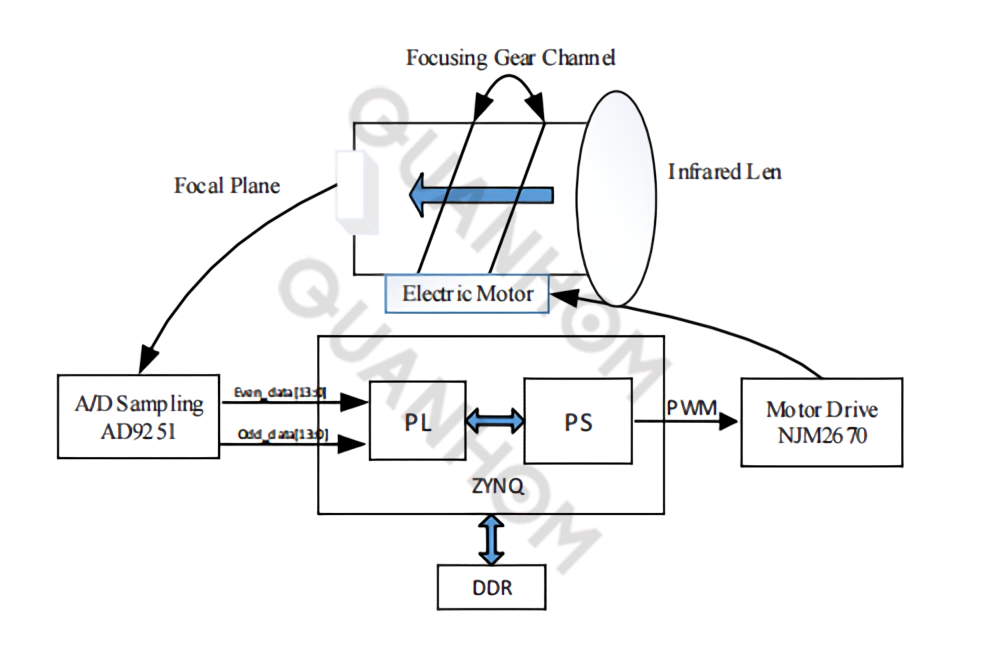
Fig.2 Estructura principal de la cámara termográfica infrarroja.
En la Figura 2 podemos ver la composición de toda la cámara termográfica. El flujo de trabajo de la cámara termográfica es el siguiente.
(1) La luz ingresa al plano focal del detector de infrarrojos a través de la lente de infrarrojos. La longitud de onda efectiva del espectro que puede pasar la lente infrarroja es de 8 a 12 m, que puede filtrar la luz blanca visible.
(2) El plano focal infrarrojo convierte la luz infrarroja en señales eléctricas. La resolución de imagen efectiva del plano focal infrarrojo seleccionado es 720×576.
(3) La señal emitida por el plano focal infrarrojo es una señal de vídeo analógica, que debe convertirse de digital a analógico en el circuito, y la señal analógica infrarroja se convierte en datos de vídeo digitales pares e impares de 14 bits con el Chip de conversión AD AD9251.
(4) Los datos de paridad deben reorganizarse dentro de la FPGA y luego se realiza el procesamiento posterior a la imagen, como la corrección no uniforme, la mejora de la imagen, la creación de franjas verticales y la compensación de temperatura en la imagen infrarroja. Esta parte no es el tema central de este artículo y no se discutirá.
En este paso, los datos de paridad generados en el paso (3) deben fusionarse línea por línea en una imagen completa. Los valores de gris de dos píxeles adyacentes en cada línea de la imagen provienen de diferentes fuentes (canales de paridad). Produce el fenómeno de las "rayas verticales". Las rayas verticales son comunes en las imágenes infrarrojas. En este paso, FPGA optimiza la imagen para eliminar la interferencia causada por las franjas verticales y hacer que todo el cuadro de la imagen se muestre cada vez más suave.
(5) Los datos de imagen procesados se codifican en un formato de video PAL a través de un circuito externo y se envían directamente a la pantalla, o se pueden comprimir y codificar en el servidor para mostrarlos a través de la red. Para el enfoque automático, debe depender de los datos de la imagen generados en este paso.
(6) Realice una evaluación de la claridad de la imagen basada en la imagen generada en (5). FPGA tiene potentes capacidades de procesamiento de datos paralelos, por lo que se selecciona un algoritmo de energía de gradiente para evaluar la claridad. El algoritmo de energía de gradiente comúnmente utilizado requiere el procesamiento de datos para todos los píxeles de la imagen completa, lo que requiere una cantidad relativamente grande de cálculos y un tiempo de procesamiento prolongado. Este artículo propone un algoritmo de energía de gradiente mejorado para evaluar la claridad de las imágenes; consulte el Capítulo 2 para obtener más detalles.
(7) El extremo PL de FPGA pasa el resultado de la evaluación de la claridad de la imagen al siguiente enlace para su procesamiento. Para este paso, todos los puntos (6) y (7) en el diseño de la literatura [5] se basan en la implementación de la computadora host en la PC. Este artículo continuará implementando el enfoque automático basado en la claridad dentro de la FPGA.
(8) El extremo PL de FPGA utiliza el algoritmo de escalada para controlar el motor de acuerdo con los datos de evaluación de definición y luego ajusta la distancia focal de la lente, obteniendo finalmente una imagen clara y completando el enfoque.
El algoritmo de escalada se utiliza ampliamente en el enfoque automático de imágenes de luz visible. Sin embargo, debido al gran ruido y las franjas verticales de la propia imagen infrarroja, aparecerá un estado de "pseudo cima de una colina" durante el proceso de ascenso. La existencia de "falsas colinas" conducirá directamente al fallo del enfoque automático. Por esta razón, este artículo ha optimizado y mejorado el algoritmo de escalada; consulte el Capítulo 3 para obtener más detalles.
En resumen, el proceso de realización del enfoque automático se muestra en la Figura 3. Todo el proceso es un proceso de retroalimentación de circuito cerrado, que requiere ajustes y optimización repetidos para finalmente lograr el estado más claro de la imagen, es decir, el estado enfocado. Este artículo utiliza la FPGA FXC7Z030-2FBG676 de la serie ZYNQ de Xilinx para implementar los pasos anteriores (4) a (8). ZYNQ se divide en extremo PL y extremo PS.
El extremo PL es una matriz de puertas lógicas programables para el procesamiento de imágenes y la evaluación de definiciones, y el extremo PS es un núcleo ARM, que se utiliza para implementar algoritmos de escalada y control de motores. Al mismo tiempo, la FPGA está equipada externamente con dos chips DDR3, el modelo es el MT41J128M16HA de Micron, con un único chip con una capacidad de 256 MB y dos chips con una capacidad de 512 MB, que se utilizan para almacenar en caché los datos de imágenes de vídeo.
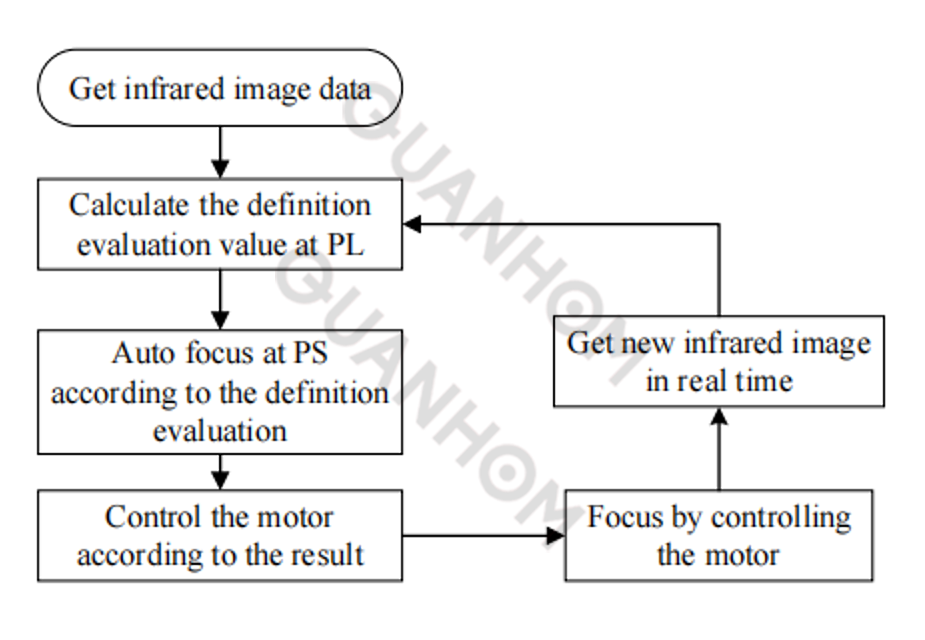
Fig.3 Proceso de enfoque automático
2. Realización de la evaluación de la calidad de la imagen infrarroja en FPGA.
2.1 Algoritmo de evaluación de claridad
La literatura [6] ofrece una introducción completa y específica al algoritmo de evaluación de definiciones, combinando las características de las imágenes infrarrojas y la dificultad de la implementación de FPGA. En este artículo, se utiliza un algoritmo de energía de gradiente para juzgar la nitidez de la imagen.
Como se muestra en la Figura 4, la suma de diferencias cuadradas se realiza en los valores de gris de los píxeles en el área de máscara de 3 × 3 de los píxeles de la imagen.
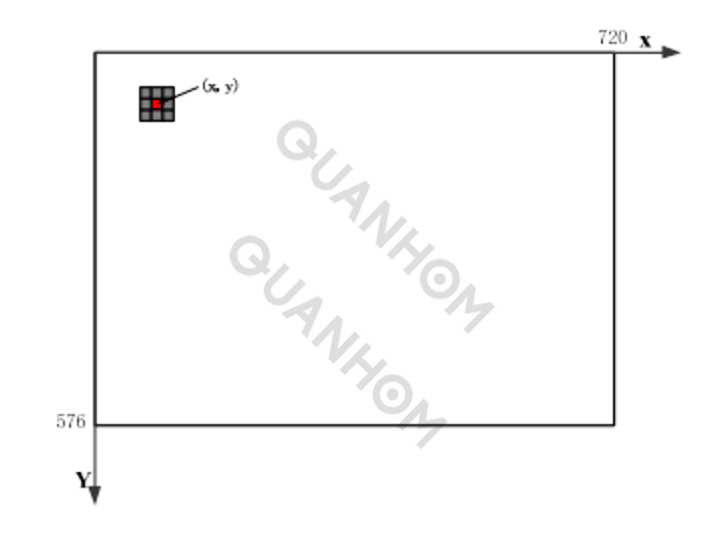
Fig.4 Cálculo del gradiente de energía usando una máscara de 3×3
Para el píxel (x, y) en la figura, defina su valor de energía como F(x, y) como la suma de los cuadrados de los valores de gris de los 8 píxeles vecinos que lo rodean y sus diferencias. Como se muestra en la fórmula (1):
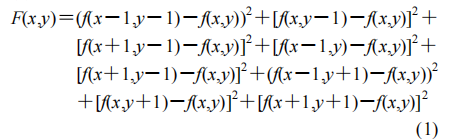
Sume la suma de todos los cuadrados de diferencia de grises de píxeles para obtener el valor de energía del gradiente de una imagen:

Para una imagen de alta definición, debido a que los detalles de la imagen son más, el valor de energía del gradiente Fvalorserá un valor relativamente grande. Para una imagen borrosa, el valor de cada píxel no es muy diferente y el valor de Fvalortambién es muy pequeño. Para una imagen de un solo píxel (todos los valores de píxeles son iguales), Fvalue=0.
Por lo tanto, el valor de Fvalorpuede reflejar el grado de detalle de la imagen, que a su vez refleja la claridad de una imagen. El algoritmo de energía de gradiente puede evaluar la nitidez de la imagen. Este artículo utiliza este algoritmo para evaluar la nitidez de la imagen infrarroja.
2.2 Mejora del algoritmo de energía de gradiente al juzgar la definición de imágenes infrarrojas
El gradiente de energía mencionado en la sección 2.1 tiene un buen resultado para evaluar la claridad de imágenes de luz blanca visible. Sin embargo, debido a que las imágenes infrarrojas están empalmadas por datos de columnas pares e impares (paso 3 mencionado en la sección 1.2), los píxeles adyacentes izquierdo y derecho aparecen atenuados. El valor del grado es muy diferente y el efecto de enfoque del uso directo del algoritmo tradicional de evaluación de energía de gradiente no es bueno. Este artículo ha realizado ciertas mejoras en el algoritmo en respuesta a este fenómeno, utilizando una máscara de 3 × 5 en lugar de una máscara de 3 × 3, lo que puede evitar la diferencia causada por los píxeles de la imagen de diferentes fuentes de video y reducir el ruido causado por la vertical. rayas hasta las más pequeñas.
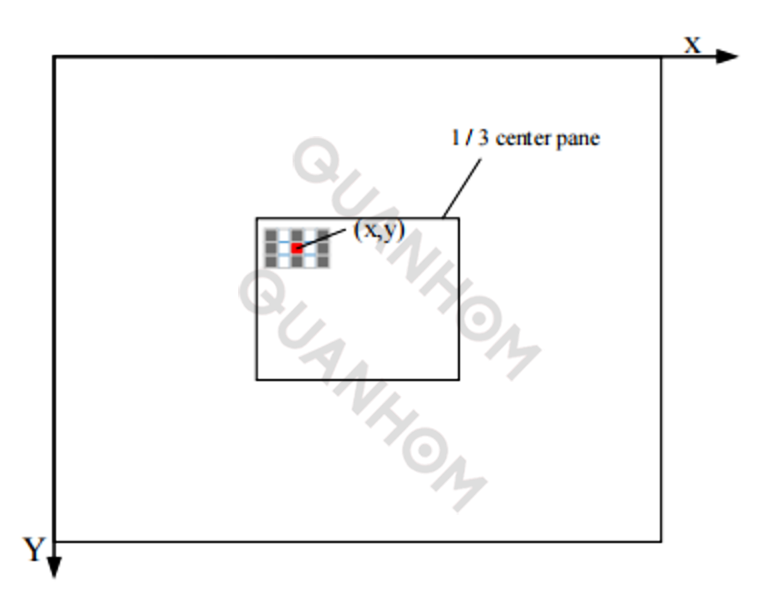
Al mismo tiempo, en vista de los requisitos de tiempo del enfoque automático de la cámara termográfica, el cálculo de energía del gradiente utilizado en este artículo no calcula el valor de píxel de toda la imagen, sino que toma los píxeles en el tercio medio del área para el cálculo. de modo que el monto del cálculo se calcule para toda la imagen 1/9 del monto. Después de mucha verificación experimental, el efecto de enfoque automático calculado tomando 1/3 del área del centro de la imagen es consistente con el efecto de toda la imagen.
La máscara mejorada y la selección del área central se muestran en la Fig. 5.
2.3 Implementación del algoritmo mejorado en FPGA
El extremo PL de FPGA utiliza FIFO y registro para realizar el búfer de 9 datos de la ventana de máscara. El programa en el lado PL debe completar ①diseñar la sincronización de las señales de control de lectura y escritura FIFO; ②almacenar en caché los datos de la máscara 3×5; ③calcule la suma de la varianza de una máscara de 3 × 5 de un solo píxel y genere los datos.
La Figura 6 muestra el diagrama esquemático del control interno de lectura y escritura de FPGA de FIFO. Cuando llegue la primera fila de datos, escríbala en FIFO1; cuando llegue la segunda fila de datos, lea la primera fila de datos almacenados en FIFO1 y escríbala en FIFO2, y escriba la segunda fila de datos en FIFO2 al mismo tiempo; cuando llegue la tercera fila de datos, lea los datos en FIFO1 y FIFO2 al mismo tiempo. En este momento, la tercera fila de datos ingresa al grupo de registros posterior REG1 junto con la primera y segunda filas de datos almacenados en FIFO1 y FIFO2 ~REG9. Los datos de REG1 ~ REG9 representan respectivamente (x-2,y-1), (x,y-1), (x+2,y-1), (x-2,y), (x, y), (x+2,y), (x-2,y+1), (x,y+1), (x+2,y+1) 9 puntos.
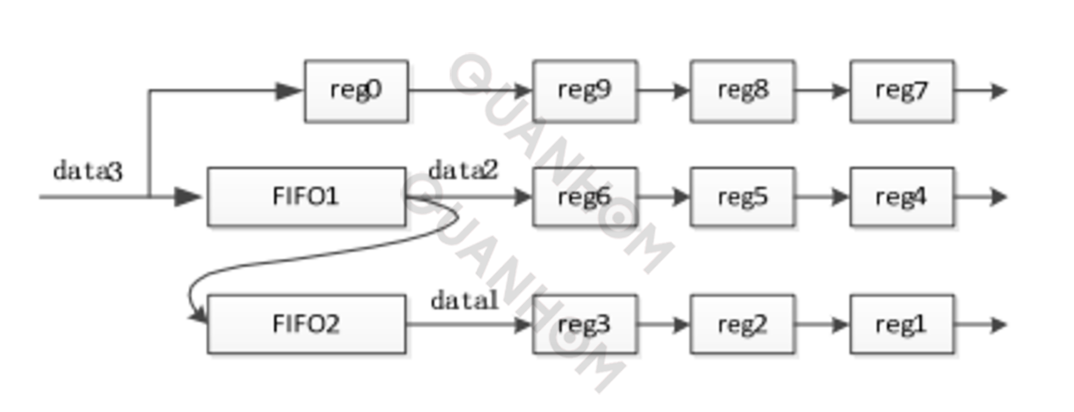
Fig.6 Caché de datos de máscara 3×3 por FIFO y registro
De acuerdo con los 9 datos en los registros REG1 ~ REG9 en la Figura 6, FPGA calcula la varianza de los valores de gris de los píxeles en REG5 y los 8 registros restantes (fórmula (1)). Dado que el algoritmo mejorado sólo calcula el tercio medio del área, el programa configura el contador de columnas y los contadores de filas para contar las filas y columnas de un marco de la imagen. Cuando el contador de columnas cuenta hasta 241~480 y el contador de filas cuenta hasta el rango de 193~384 (este rango significa que para una pantalla con resolución de 720×576, 1/3 del punto de píxel en el área central), los datos de píxel se considera disponible para el cálculo. Acumule los valores de varianza de todos los píxeles en este rango y finalmente obtenga un valor de energía de gradiente de 32 bits (fórmula (2)).
Según la teoría presentada anteriormente, cuanto mayor sea el valor de 32 bits, más clara será la imagen, lo que proporciona una base para escalar montañas para lograr el ajuste del enfoque más adelante.
3. Implementación del algoritmo mejorado de escalada en FPGA
3.1 Enfoque automático basado en un algoritmo de escalada
La referencia [7] tiene una introducción más detallada al algoritmo de escalada. Como se muestra en la Figura 7, el principio básico del algoritmo de escalada es un proceso de aproximación continua al valor máximo de energía del gradiente. Como se puede ver en el diagrama de flujo de enfoque automático en la Figura 3, la imagen cambiará después de cada enfoque y la energía del gradiente también cambiará en consecuencia. En este proceso de cambio continuo, encuentre el valor máximo de energía del gradiente, que es el momento más claro de la imagen. La posición de la lente correspondiente a la imagen más clara es la posición de enfoque.
Se puede ver en el diagrama esquemático de la Figura 7 que hay 8 pasos para escalar montañas en el proceso de enfoque. Los primeros 3 pasos siempre están en el proceso "cuesta arriba", y los pasos 4 y 5 están en el proceso "cuesta abajo". En este momento, la imagen ha empeorado que en el paso 3 anterior, por lo que los pasos 6 y 7 comienzan a "retroceder hacia la montaña". Después del séptimo paso, ya pasé la cima de la montaña, así que cambié la longitud del paso y finalmente subí a la "cima de la montaña" en el octavo paso para completar el trabajo de concentración.
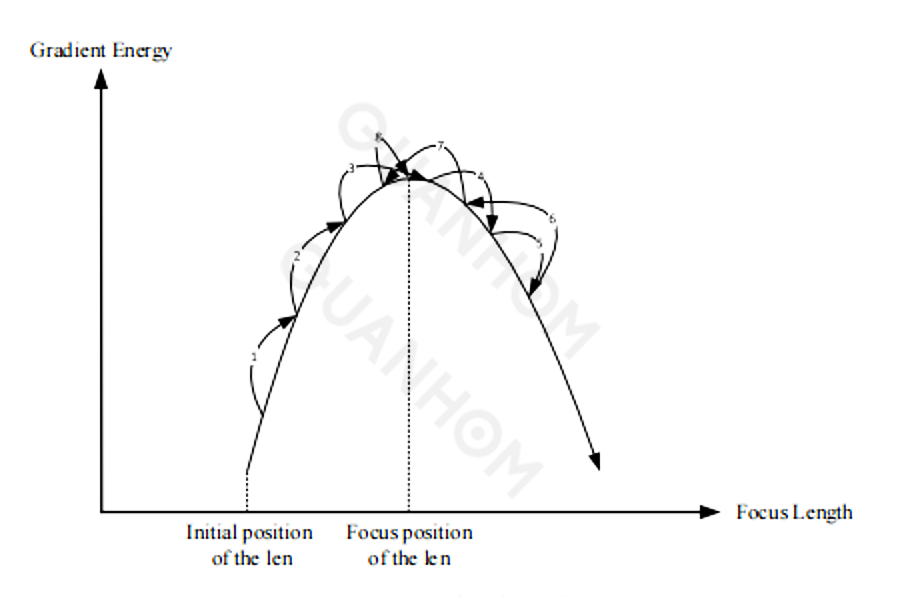
Fig.7 Algoritmo de escalada
En el trabajo real, el proceso de escalada a menudo se puede completar en 8 intentos, durante los cuales es necesario ajustar continuamente la longitud del paso para lograr el propósito de concentrarse.
3.2 Mejora y realización del algoritmo de escalada en enfoque automático con lentes infrarrojas
La Figura 7 muestra la implementación del montañismo bajo la pantalla de luz blanca, que es relativamente ideal. Para imágenes infrarrojas con ruido relativamente grande, habrá múltiples “cimas de montaña” durante el proceso de escalada, como se muestra en la Figura 8.
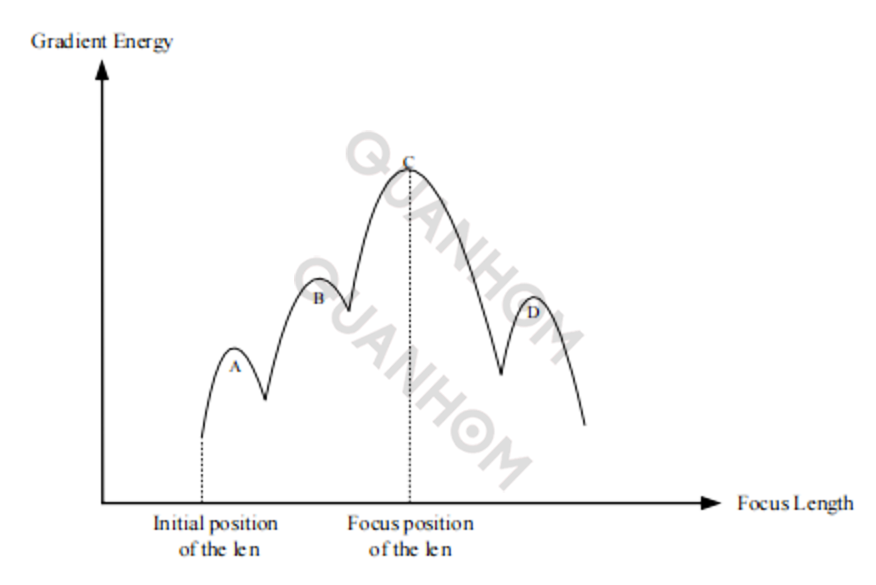
Fig.8 Subida de colinas de enfoque de imágenes infrarrojas
A, B y D en la Figura 8 son "pseudo cimas de montañas", causadas por el ruido en la imagen infrarroja. De acuerdo con el proceso estándar de montañismo, comenzando desde la posición inicial de la lente para escalar la montaña, es fácil juzgar erróneamente que A es la cima de la montaña. En este momento, no se puede lograr el propósito de concentrarse. Por esta razón, este artículo optimiza el algoritmo de escalada para el enfoque automático de imágenes infrarrojas de la siguiente manera.
(1) El extremo PS de la FPGA recibe el valor de energía de gradiente transmitido por el extremo PL para determinar si se debe escalar la montaña. Para reducir la influencia del ruido, cada 3 valores recibidos se promedian como base para escalar montañas, es decir, para calcular el valor promedio de tres valores de energía de gradiente para una imagen fija, a fin de reducir la influencia del ruido aleatorio en la evaluación de la claridad de la imagen.
(2) Con respecto al mecanismo de evaluación de si "regresar y escalar la montaña", se considera que con la longitud del paso actual, si "baja la montaña" dos veces seguidas, entonces comienza a mirar hacia atrás. Bajo este mecanismo, los picos relativamente pequeños de A y B rebotarán en el valor de energía del gradiente durante el segundo proceso de determinación, lo que se considera un pico falso, pero esta situación no ocurrirá en el pico verdadero C.
Según los dos esquemas de optimización anteriores, el proceso de enfoque automático en el lado PS basado en FPGA de este artículo se muestra en la Figura 9.
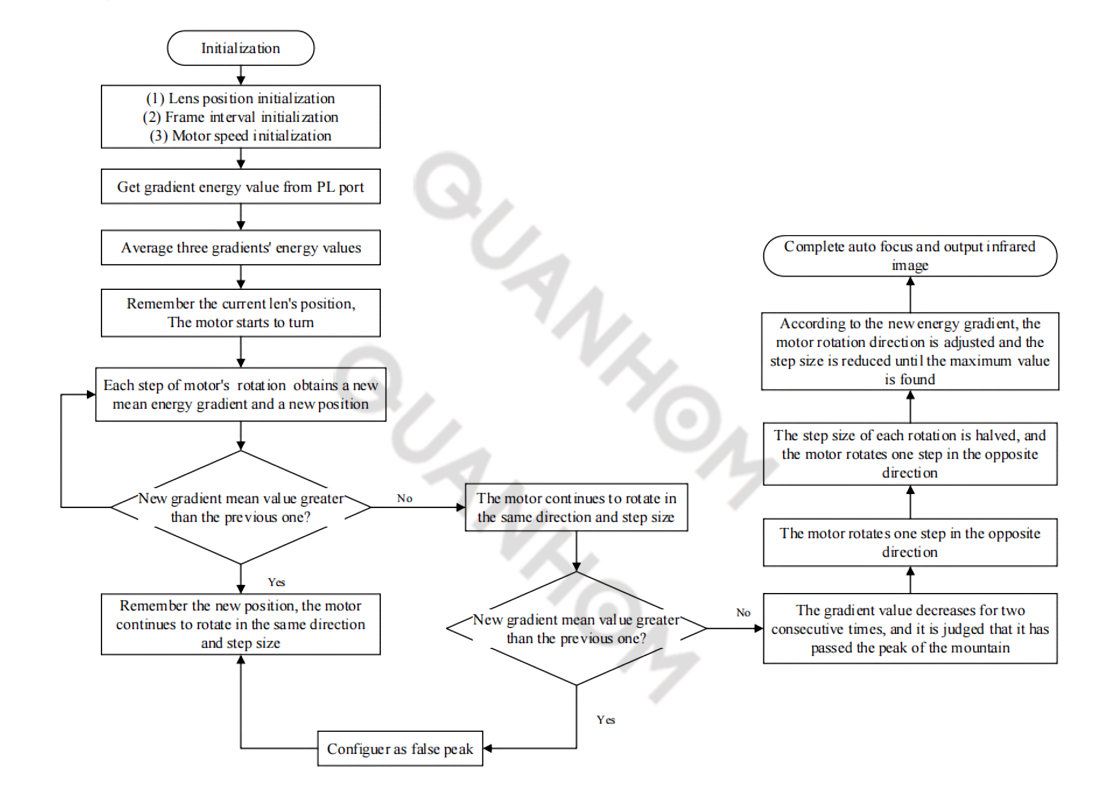
Fig.9 El algoritmo mejorado de escalada implementado en FPGA PS
4 Realización de funciones y prueba de rendimiento.
4.1 Efecto de enfoque
La tecnología de enfoque automático propuesta en este artículo y los métodos de enfoque automático propuestos en la literatura [2] y la literatura [4] se reproducen y comparan respectivamente. Como se muestra en la Figura 10.

(a) Imagen de luz visible (b) Imagen original infrarroja
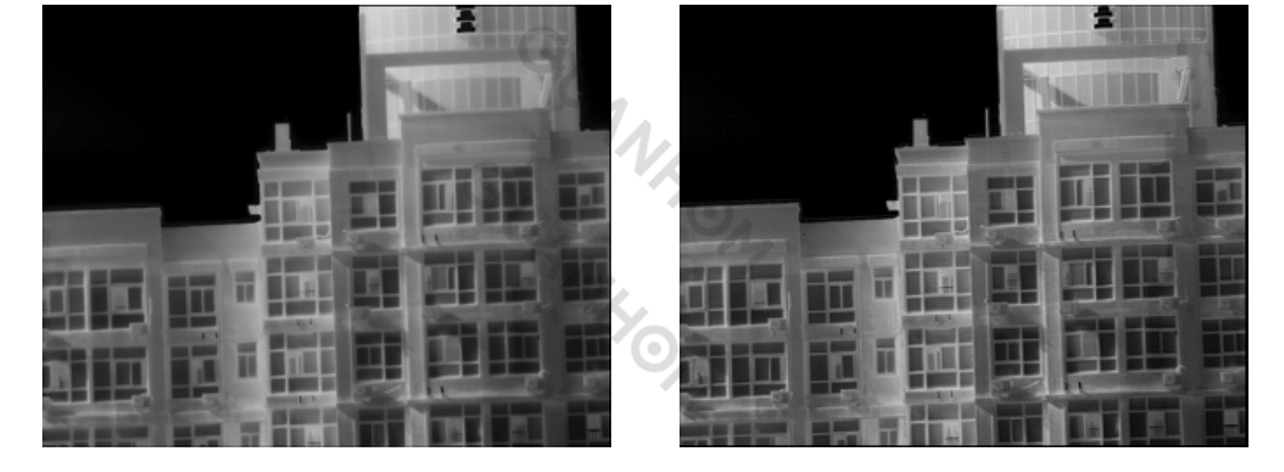
(c) Imagen implementada en el documento[2] (d) Imagen implementada en el documento[4]
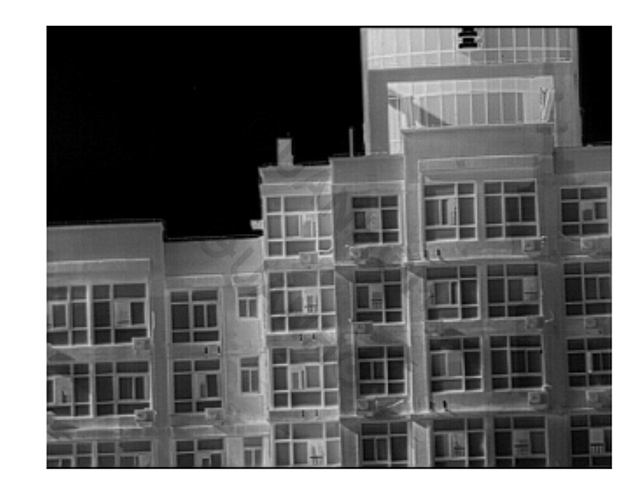
(e) Imagen implementada con el método propuesto en este artículo.
Fig.10 El efecto del enfoque automático propuesto en este artículo se compara con otros esquemas.
Las 4 imágenes infrarrojas de la Figura 10 muestran el efecto de enfoque de la lente infrarroja. Para este proceso de enfoque, dado que la imagen original es relativamente clara, se probará la capacidad del algoritmo de enfoque para leer y procesar los detalles de la imagen. Para evaluar objetivamente la nitidez de las cuatro imágenes (b), (c), (d) y (e), se utiliza el "valor de varianza de escala de grises" propuesto en la Referencia [8] para evaluar la nitidez de las cuatro imágenes. .
En comparación con una imagen borrosa, una imagen bien enfocada debería tener una diferencia de escala de grises mayor entre sus datos, es decir, su variación debería ser mayor. La nitidez de la imagen se puede medir mediante la variación de los datos en escala de grises de la imagen; cuanto mayor sea la variación, lo que significa mejor será la claridad.
Calcule el valor de varianza en escala de grises de la imagen en MATLAB y los resultados se muestran en la Tabla 1.
Tabla 1 Variación de grises de cuatro imágenes
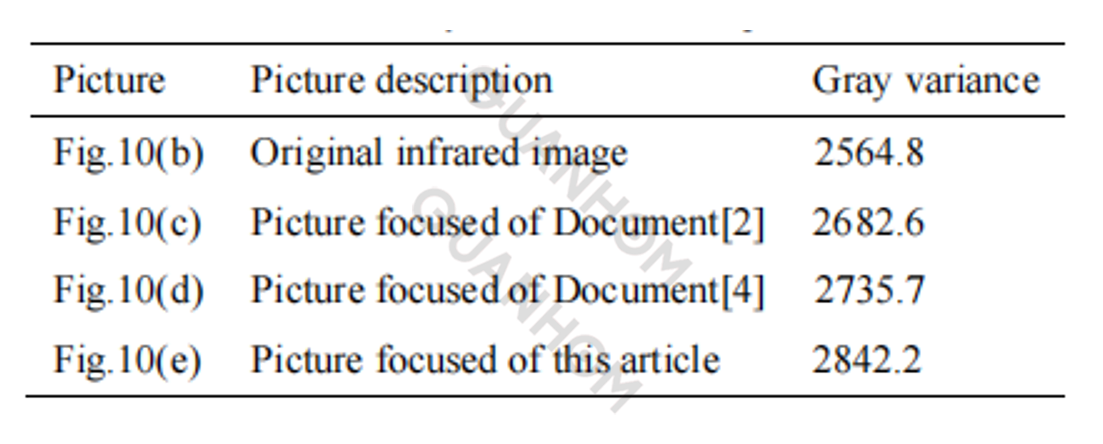
Se puede ver en la imagen de la Figura 10 y la Tabla 1:
La imagen infrarroja original (b) no ha sido sometida a ningún procesamiento de enfoque. Aunque la imagen puede mostrar la imagen del objeto, todavía está un poco borrosa a simple vista y su valor de variación en la escala de grises es relativamente pequeño, lo que indica que los detalles no son suficientes.
(c) La imagen se procesa mediante el método de enfoque de imagen con luz blanca, sin considerar las características del ruido de la franja vertical de la imagen infrarroja, por lo que el efecto de enfoque es general y se puede ver en el valor de variación de la escala de grises.
(d) El efecto de visualización de la imagen mejora hasta cierto punto en comparación con (c), pero no puede alcanzar el efecto del algoritmo (e) propuesto en este artículo. Debería ser que el algoritmo de optimización en el proceso de escalada no sea lo suficientemente bueno.
(e) La imagen muestra el efecto de visualización enfocada logrado por el algoritmo propuesto en este artículo. Se puede ver claramente que el efecto de visualización es mejor que (d) y (c).
La calidad definitoria de la imagen también se puede ver en la magnitud del valor de la varianza de la escala de grises de las cuatro imágenes en la Tabla 1, y la imagen después del enfoque del algoritmo propuesto en este artículo es la más clara. Muestra que el algoritmo propuesto en este artículo tiene un buen rendimiento y efecto en el proceso de enfoque automático.
La Figura 11 compara la imagen de visualización de enfoque obtenida después de calcular el valor de energía del gradiente de toda la imagen y calcular el valor de energía del gradiente de 1/3 del área. La imagen (b) de la Fig. 11 es la imagen (e) de la Fig. 10.
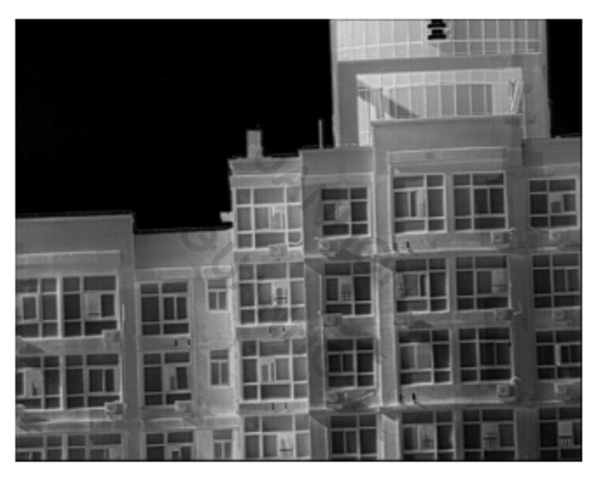
(a) Cálculo de energía de gradiente de imagen completa
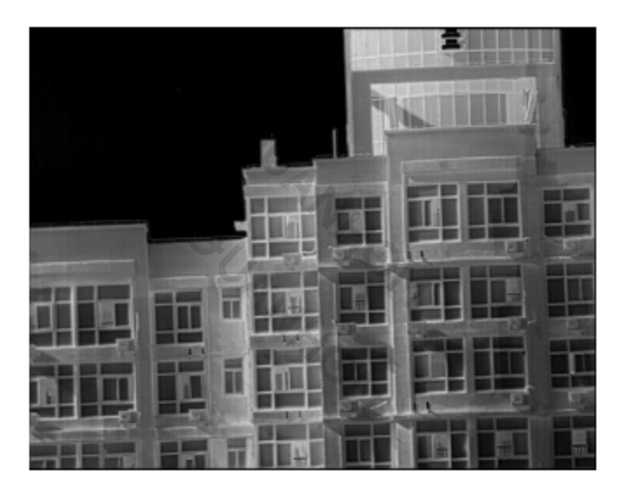
(b) Cálculo de energía de gradiente de imagen de 1/3
Fig.11 Comparación de la visualización de imágenes basada en el gradiente de energía de dos regiones
De la comparación de las dos imágenes en la Figura 11, básicamente no hay diferencia. La diferencia del valor cuadrático medio del nivel de grises de los dos es menor que 1, lo que muestra que el método propuesto en este artículo para obtener el valor de energía del gradiente desde el centro 1/3 de la imagen es factible. La ventaja de este algoritmo optimizado y mejorado es que ahorra en gran medida tiempo de enfoque automático y consumo de recursos FPGA.
4.2 Curva de subida de pendientes durante el enfoque
Esta sección analiza las curvas de subida de colinas de los tres algoritmos en el proceso de enfoque automático. Dado que todo el ascenso de la montaña se realiza en función de la rotación del motor, todo el proceso de ascenso de la montaña se puede observar a través del ángulo de rotación del motor.
A continuación se comparan los tres algoritmos (referencia [2], referencia [4] y este artículo) en el proceso de enfoque automático, la rotación del motor y el enfoque final. Después de la prueba anterior, se concluye que el motor necesita girar 751 en dirección positiva desde la posición inicial hasta la posición de enfoque, que es la línea de puntos de referencia horizontal en la Figura 12.
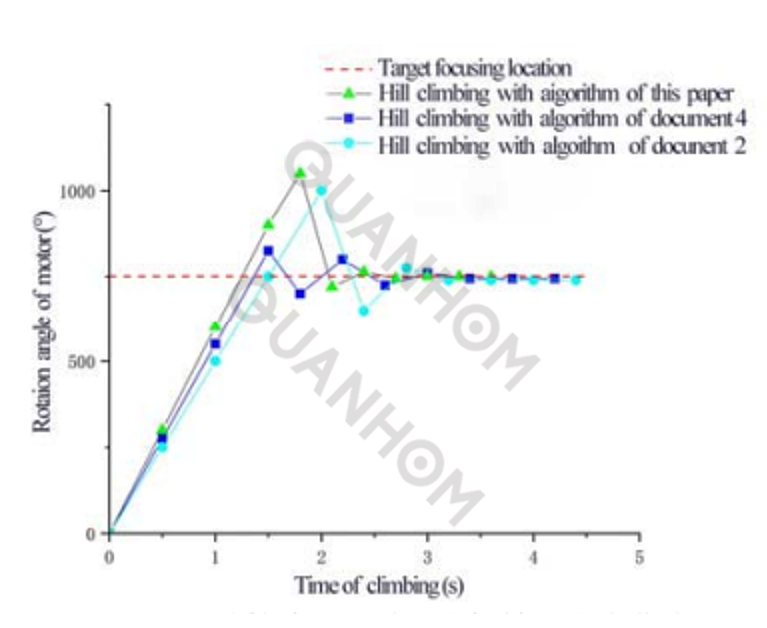
Fig.12 Curvas de enfoque de rotación del motor con tres algoritmos para montañismo
Se puede ver en la Figura 12:
(1) El algoritmo de montañismo propuesto en este artículo tiene un paso relativamente grande en la etapa inicial, por lo que puede subir rápidamente a la cima de la montaña. Al final de la tercera subida, ha superado la cima de la montaña, por lo que la longitud del paso de la cuarta subida se reduce para juzgar si se trata de una "pseudo cima de la montaña";
(2) Los tres algoritmos son más precisos al juzgar la "cima de la montaña", porque la imagen en sí es relativamente limpia y el ruido es pequeño, por lo que la escalada secundaria propuesta por el algoritmo en este artículo no juega un papel aquí;
(3) El algoritmo propuesto en este artículo y el algoritmo propuesto en la literatura [4] responden mejor que el algoritmo propuesto en la literatura [2] al juzgar la tendencia descendente y el control es mejor;
(4) El algoritmo propuesto en este artículo básicamente alcanzó un estado estable (fin de enfoque) después del séptimo ascenso y alcanzó el final del enfoque en el tercio, y los otros dos alcanzaron un estado estable después del octavo ascenso. La literatura [2] El algoritmo en [4] toma 3,6 s y el algoritmo en [4] toma 3,4 s;
(5) Los tres algoritmos tienen diferencias en el tamaño del paso de configuración y el tiempo de cada operación, por lo que se puede ver en la Figura 12 que el tiempo del proceso de escalada en la etapa inicial es relativamente consistente y el tiempo es inconsistente si no hay ajuste en la etapa posterior;
(6) Desde la perspectiva del efecto de enfoque final, el algoritmo propuesto en este artículo es mejor que el efecto de enfoque de la literatura [2] y la literatura [4], y el efecto de enfoque de la literatura [2] es el peor, que es Lo mismo que el efecto de enfoque que se muestra en la Figura 10.
4.3 Prueba de tiempo de enfoque automático
El sistema de enfoque automático de lentes infrarrojas basado en la arquitectura FPGA puede completar mejor el trabajo de enfoque automático. El modo de trabajo de CPU única también tiene una gran ventaja sobre otras arquitecturas en términos de integración de productos.
Al mismo tiempo, este sistema también tiene un mejor rendimiento en tiempo real. A juzgar por las referencias, otros esquemas no detallan demasiado el tiempo de enfoque automático. Para el diseño propuesto en este artículo, se puede controlar en 5 s desde el inicio de la obtención de imágenes hasta la finalización del enfoque. El análisis principal del consumo de tiempo se muestra en la Figura 13. El tiempo total es de 3,55 s, que es mejor que el tiempo de enfoque automático de la mayoría de las cámaras infrarrojas del mercado.
4.4 Consumo de recursos FPGA
Este documento utiliza 1/3 de toda la pantalla para calcular el valor de energía del gradiente, principalmente para ahorrar recursos FPGA y tiempo de cálculo. A partir del tiempo de cálculo, la diferencia entre el cálculo de la energía del gradiente de píxeles de toda la imagen y el cálculo de 1/3 del área es 42,84-4,76 = 38,08 ms. Aunque este tiempo es pequeño para los 4,55 s utilizados en todo el proceso de enfoque, es un tiempo relativamente largo para el funcionamiento del programa interno de la FPGA.
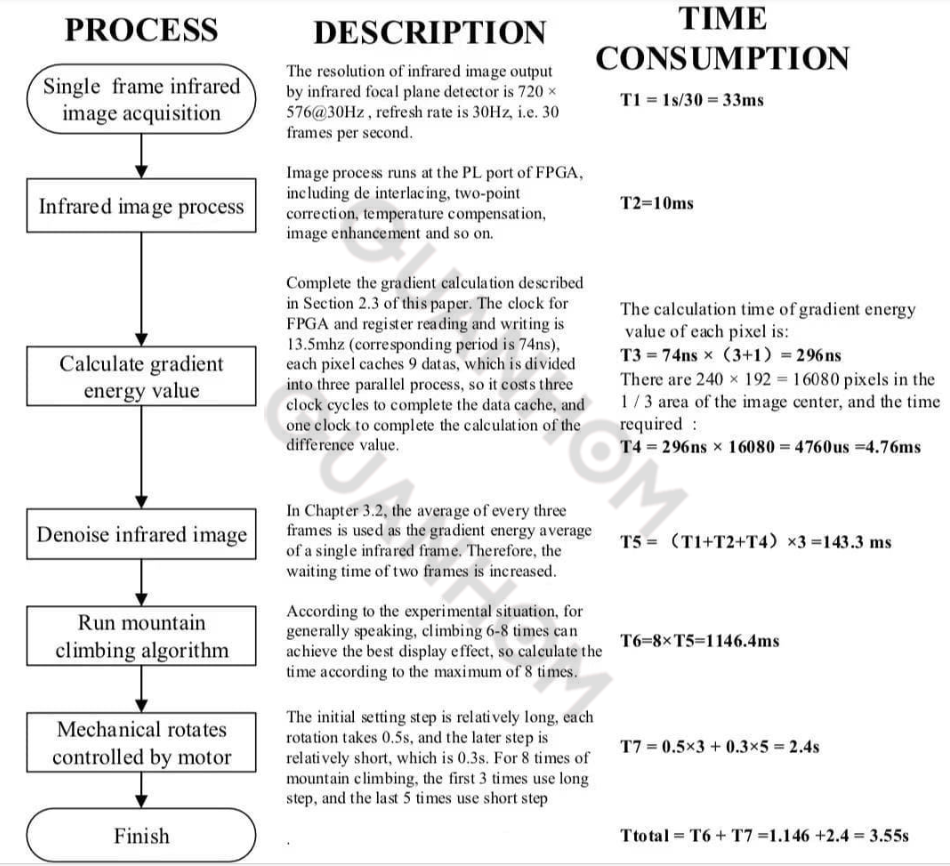
Fig.13 Tiempo dedicado al enfoque automático
Para el consumo de recursos internos de FPGA, la diferencia entre los dos también es relativamente grande. La Tabla 2 enumera el consumo de recursos FPGA por los dos métodos.

Se puede ver en la Tabla 2 que el método de enfoque automático utilizado en este artículo no utiliza muchos recursos internos de FPGA, incluso si se realiza para toda la pantalla, los recursos del XC7Z030 son suficientes. Pero para los FPGA, cuantos menos recursos se utilizan, más controlable es el programa.
Con el objetivo de lograr el enfoque automático de la lente del dispositivo de imágenes térmicas infrarrojas, este artículo propone una tecnología de enfoque automático de lentes infrarrojas basada en FPGA. En comparación con la tecnología de enfoque automático de luz blanca visible y la tecnología de enfoque infrarrojo tradicional, la tecnología propuesta en este documento tiene tres mejoras importantes:
①Toda la máquina utiliza un solo procesador FPGA para completar el procesamiento de imágenes infrarrojas y el trabajo de visualización y enfoque de lentes, lo que mejora en gran medida la integración del producto;
② Teniendo en cuenta las características de las imágenes infrarrojas y las ventajas del procesamiento paralelo de datos FPGA, se propone un algoritmo de energía de gradiente mejorado, que puede evaluar verdaderamente la claridad de las imágenes infrarrojas;
③De acuerdo con las características de las imágenes infrarrojas, el algoritmo de escalada de montañas se mejora y optimiza para filtrar eficazmente las cimas falsas de las montañas y lograr el propósito de escalar montañas.
Este artículo verifica las tres mejoras técnicas anteriores y los resultados también verifican la superioridad del algoritmo propuesto en este artículo. En la actualidad, la tecnología de enfoque automático propuesta en este artículo se ha aplicado con madurez a los productos de imágenes térmicas, y sus funciones y rendimiento se encuentran en el nivel líder en la industria y tiene una buena importancia de promoción. Como experto en cámaras termográficas infrarrojas desde hace muchos años, Quanhom puede compartir algunos conocimientos profesionales y completos en óptica infrarroja.
Como fabricante experimentado deComponentes optoelectromecánicos, Quanhom se compromete a proporcionar a los usuarios una variedad de cámaras térmicas infrarrojas (LWIR, MWIR y SWIR) de excelente calidad. Tenemos una buena reputación en la industria gracias a nuestra tecnología líder en I+D y nuestra excelente tecnología de fabricación. Y nuestros productos se venden en todo el mundo y han recibido elogios y confianza de muchos clientes. Si desea conocer más sobre nuestros servicios relacionados, puede enviarnos sus necesidades y le daremos una respuesta satisfactoria lo antes posible.
Autores: Sun Shaowei, Yang Yuetao, Yang Bingwei, Wan Anjun, Zhong Hailin
Fuente de la revista: Vol.43 No.5 Tecnología infrarroja mayo de 2021
Fecha de recepción: 2020-11-07; fecha de revisión: 2021-03-24.
Referencias:
[1] ZHAO Zhibin. Investigación sobre tecnología de enfoque automático de cámara de luz visible para plataforma fotoeléctrica aérea [D]. Escuela de Graduados de la Academia de Ciencias de China (Instituto de Óptica, Maquinaria de Precisión y Física de Changchun), 2010.
[2] NI Wenjia. Sistema de monitoreo de video con enfoque automático basado en FPGA[D]. Wuhan: Universidad Tecnológica de Wuhan, 2012.
[3] LI Shenyang. Algoritmo de enfoque automático basado en el valor energético de la imagen infrarroja [J]. Tecnología electrónica Shanxi, 2014(4): 6-9.
[4] ZHANG Bo, ZHANG Gang, CHENG Yongqiang. Diseño de procesador de vídeo con función de enfoque automático [J]. LCD y pantalla, 2010, 25(3): 396-400.
[5] WAN Xiaofan, LYU Yaowen, ZHANG Dongyan. Diseño de un sistema en línea de cámara termográfica infrarroja con enfoque automático [J]. Tecnología infrarroja, 2018, 40(8): 743-748.
[6] WANG Jian. Investigación sobre tecnología de enfoque automático basada en procesamiento de imágenes[D]. Chengdu: Escuela de Graduados de la Academia China de Ciencias (Instituto de Tecnología Optoelectrónica), 2013.
[7] Xu Zhili. Investigación sobre sistema de autoenfoque SEM basado en FPGA[D]. Nanjing: Universidad del Sureste, 2016.
[8] CHEN Guojin, ZHU Miaofen, ZHANG Kesong. Estudio sobre una función de evaluación de la nitidez del proceso de enfoque de imágenesk[J]. Adquisición y procesamiento de datos, 2009, 24(2): 165-169.