Diseño y realización de un sistema óptico infrarrojo ligero y pequeño de onda larga.
- participación
- Tiempo de Publicación
- 2022/3/10
Resumen
De acuerdo con los requisitos de índice y las limitaciones de la plataforma del instrumento, Quanhom propone una estructura óptica catadióptrica liviana, pequeña y compacta que simplifica la forma óptica principal para la aplicación de detectores de refrigeración, que es adecuada para cápsulas optoelectrónicas de onda larga de UAV producidas en masa. cámaras infrarrojas.

La región espectral infrarroja de onda larga de 8-14 μm no es sólo la ventana atmosférica sino también la banda concentrada de energía de radiación térmica de los objetos a temperatura ambiente.
El sistema fotoeléctrico pasivo que funciona en esta zona detecta principalmente la radiación térmica de la propia fuente objetivo. Puede trabajar todo el día, es pasivo y tiene buena ocultación. Se puede utilizar en el ejército para reconocimiento, captura, seguimiento de objetivos, etc. También se puede utilizar en aplicaciones como advertencia de incendios forestales, vigilancia de seguridad nocturna y búsqueda y rescate.
Los instrumentos de detección de infrarrojos de onda larga para aplicaciones de teledetección suelen montarse en plataformas como satélites, aviones y vehículos aéreos no tripulados. En los últimos años ha habido un aumento en la investigación sobre las aplicaciones de los UAV.
Estados Unidos continúa promoviendo el uso de sensores de imágenes multiespectrales instalados en vehículos aéreos no tripulados. En marzo de 2018, el Cuerpo de Marines de EE. UU. desplegó por primera vez un pequeño UAV de ojo instantáneo de cuatro rotores con una altura de vuelo de 3657,6 m, equipado con tres sensores fotoeléctricos infrarrojos y un sensor infrarrojo térmico orientado hacia adelante.
En julio de 2018, la empresa rusa Zala implementó lidar en drones por primera vez con la ayuda de un mejor conocimiento de la situación y capacidades de recopilación de datos más rápidas del lidar. Actualmente, el sensor fotoeléctrico MEOS montado en el "UAV Dome" de la empresa israelí Rafal puede detectar objetivos con un tamaño mínimo de 20 cm2 a una distancia de 3,2 km y un campo de visión instantáneo de 0,14 mrad.
Las cargas útiles optoelectrónicas adecuadas para los UAV se han desarrollado rápidamente en función y rendimiento y pueden obtener imágenes y datos de alta calidad en tiempo real, día y noche, lo que mejora en gran medida las capacidades de reconocimiento, vigilancia y captura de objetivos.
Sin embargo, debido a la capacidad de carga limitada de los UAV, se requiere un alto rendimiento de carga útil, peso ligero y tamaño pequeño y, al mismo tiempo, para aplicaciones comerciales y por lotes a gran escala, también tiene las características de bajo costo.
Debido a las ventajas de una actitud controlable y de alta precisión en un amplio rango, las cápsulas optoelectrónicas se usan ampliamente en plataformas UAV, mientras que los instrumentos optoelectrónicos instalados en cápsulas optoelectrónicas tienen restricciones de volumen y peso más estrictas, y es necesario considerar sus sistemas ópticos. Diseño ligero y compacto.
Con la tendencia de desarrollo de miniaturización y ligereza de los sistemas ópticos infrarrojos, la forma de la superficie de las lentes ópticas suele ser más complicada. También se imponen mayores exigencias a la calidad microscópica de la superficie óptica de materiales infrarrojos duros y quebradizos como el seleniuro de germanio y zinc.
En la actualidad, la tecnología de torneado con diamante de un solo punto se ha utilizado ampliamente en el procesamiento en frío de piezas ópticas infrarrojas. Bajo la premisa de ciertos materiales y otros parámetros, se pueden optimizar la precisión del torneado con diamante de un solo punto, los parámetros de torneado, la vibración de la máquina y los métodos de mecanizado de superficies esféricas.
De acuerdo con los requisitos de índice y las limitaciones de la plataforma del instrumento, Quanhom propone una estructura óptica catadióptrica liviana, pequeña y compacta que simplifica la forma óptica principal para la aplicación de detectores de refrigeración, que es adecuada para cápsulas optoelectrónicas de onda larga de UAV producidas en masa. cámaras infrarrojas.
El diseño óptico, el procesamiento, la configuración de inspección y los experimentos de imágenes de esta cámara se describirán en detalle a continuación.
1. Restricciones de plataforma y requisitos de índice
1.1 Método de detección y limitaciones de recursos
El sistema óptico está instalado en la cápsula optoelectrónica y montado en el UAV. El instrumento tiene un campo de visión medio. A través de la rotación bidimensional del módulo optoelectrónico, se realiza la búsqueda de objetivos en un área amplia, se encuentra el objetivo y se bloquea para su seguimiento. Como se muestra en la Figura 1, la cápsula optoelectrónica adopta una estructura esférica, el radio de la cápsula es inferior a 200 mm, el diámetro de la ventana es de 165 mm, el espacio óptico es de 320 mm × 310 mm × 302 mm (incluido el detector) y el módulo óptico -Se requiere que la masa mecánica de la cámara sea inferior a 2,0 kg (no incluida). incluyendo tocadiscos y electrónica).
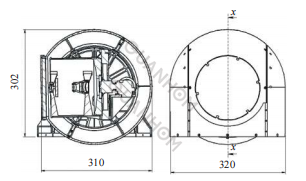
Fig.1 Diagrama esquemático del método de detección.
1.2 Indicadores relacionados con el diseño óptico.
Para mejorar la sensibilidad del detector del instrumento, toda la máquina utiliza un detector de matriz de área enfriada, el tamaño de píxel nx×ny es 320×256, el tamaño de píxel p es 30μm×30μm y los parámetros de diseño del sistema óptico se muestran en Tabla 1.
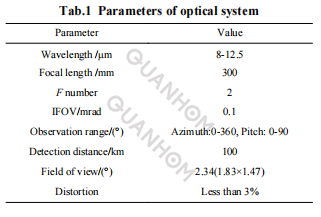
De acuerdo con los requisitos de la distancia de detección más lejana del instrumento, el diámetro D del sistema se resuelve en 150 mm. Si el número F del detector es 2, la distancia focal del sistema f es 300 mm, el campo de visión instantáneo IFOV=p/f=0,1 mrad, es decir, la resolución del objetivo a 100 kilómetros es 10 m y el campo de visión El campo de visión es:
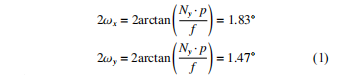
Es decir, el campo de visión circular diagonal es de 2,34°.
2. Diseño óptico
2.1 Consideraciones de selección
Las estructuras del sistema óptico infrarrojo incluyen estructuras transmisivas, reflectantes y catadióptricas. Debido a los pocos materiales opcionales y al 100% de coincidencia de pantalla fría del grupo de lentes de transmisión, la lente frontal tiene un gran diámetro y un gran volumen y peso, pero es relativamente fácil de procesar y ajustar. Es adecuado para diámetros pequeños y medianos, resoluciones medias y bajas y grandes campos de visión.
El sistema reflectante no tiene aberración cromática, pero el campo de visión es relativamente pequeño y la instalación y ajuste son relativamente pequeños. Difícil, adecuado para apertura media y grande, resolución media alta, campo de visión pequeño; El sistema catadióptrico tiene las ventajas de los dos primeros, gran capacidad de corrección de aberraciones, tamaño compacto, puede lograr una coincidencia de pantalla fría del 100% a través de imágenes secundarias, para ocasiones de calibre mediano y grande, resolución media y alta, y campo de visión medio.
Dado el análisis comparativo anterior, combinado con los requisitos de la plataforma de carga del UAV en cuanto a volumen, recursos de peso y distancia de detección del instrumento, el sistema selecciona una estructura óptica catadióptrica y, al mismo tiempo, tiene en cuenta el costo y el ciclo. de procesamiento, inspección y montaje, para la aplicación de detectores de refrigeración, se propone en el diseño óptico una estructura óptica catadióptrica que simplifica la forma óptica principal.
2.2 Estructura inicial
En muchas referencias, el sistema óptico de la cámara infrarroja catadióptrica adopta la estructura del sistema principal de dos espejos y el grupo de lentes correctoras. El diseño óptico generalmente resuelve primero la solución inicial de la estructura de dos espejos y luego agrega el grupo de lentes para su optimización.
Establezca la relación de oscurecimiento y el tipo de aberración a corregir, establezca el coeficiente de aberración correspondiente en cero, resuelva el radio de curvatura, el coeficiente cónico y el intervalo central de los espejos primario y secundario, y luego amplíe la construcción inicial del Se puede realizar un sistema de dos espejos.
En el sistema catadióptrico de uso común, la óptica principal es una estructura de casete que corrige la aberración esférica y la aberración del coma, y el espejo primario y el espejo secundario son ambos hiperboloides.
Detrás se agrega un grupo de lentes correctores, y el grupo de lentes correctores es generalmente esférico. El sistema simplifica el sistema plegable comúnmente utilizado considerando el volumen y el peso, la dificultad de montaje y ajuste, el costo de desarrollo y el entorno de uso.
El sistema catadióptrico simplificado se compone de un sistema principal plegado de Newton y un grupo de espejos correctores. El espejo principal del sistema principal se simplifica a un paraboloide, el espejo secundario se simplifica a un espejo plano y el espejo secundario no tiene energía solo para la trayectoria óptica plegada, que se agrega al grupo de espejos de corrección. Podemos agregar asférico para corregir las aberraciones fuera del eje.
El diagrama esquemático simplificado de la trayectoria óptica del sistema primario plegado de Newton se muestra en la Figura 2, donde h1yh2son las alturas de los espejos primario y secundario de la luz en el borde del campo de visión central, respectivamente.
I2y yo2' son la distancia al objeto y la distancia a la imagen del espejo secundario, y F1' es la distancia focal del espejo principal, R01es el radio de curvatura central del espejo primario, R2es el radio de curvatura del espejo secundario, d es el intervalo entre los espejos primario y secundario, α es la relación de bloqueo del espejo secundario y β es el aumento del espejo secundario. Para el sistema simplificado, se cumplen las siguientes expresiones:
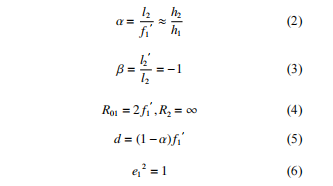
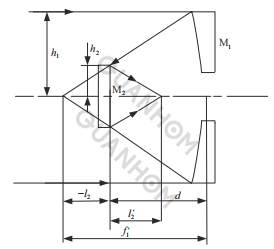
Fig.2 Diagrama esquemático simplificado del sistema principal de plegado Newton
Los pasos iniciales de la solución estructural del sistema son: (1) Asignar la potencia de la óptica principal y la lente correctora, determinar f1' y determinar el radio de curvatura central R01 del espejo principal de acuerdo con la fórmula (4); (2) Establecer la relación de bloqueo α, según la fórmula (5) Resuelva el intervalo d de los espejos primario y secundario; (3) Asigne preliminarmente la potencia óptica del grupo de lentes correctores y establezca la distancia al objeto del grupo de lentes correctores.
Las ventajas de este diseño son:
(1) No es necesario diseñar espejos de compensación ni hologramas para procesar y ajustar el espejo primario parabólico. La instalación y ajuste del sistema óptico principal consiste principalmente en la instalación sin estrés del espejo parabólico principal. La detección y el ajuste son relativamente simples, el costo de desarrollo es bajo y el ciclo de desarrollo es corto.
(2) Mueva la superficie asférica a la lente del grupo de lentes correctores y utilice la tecnología de torneado de diamante de un solo punto para procesar. Los procedimientos de procesamiento y los costos de la superficie asférica rotacionalmente simétrica y la superficie esférica son básicamente los mismos, y la precisión de la forma de la superficie de la lente de pequeño diámetro es alta.
(3) La pupila de salida del sistema óptico está detrás del grupo de lentes correctores y está conectada a la pantalla fría del detector para lograr una coincidencia de pantalla fría del 100%, reducir la influencia del fondo térmico y mejorar la sensibilidad.
(4) El grupo de espejos de corrección está entre los espejos primario y secundario, el plano focal del sistema está cerca del espejo primario y los componentes de refrigeración y las piezas de instalación del detector están en la parte posterior del espejo primario, lo cual es beneficioso para acortar el tiempo. Volumen de cámara e instalación de detectores.
Las ventajas anteriores son adecuadas para el desarrollo rápido por lotes de sistemas ligeros, pequeños y compactos.
2.3 Diseño y resultados óptimos
Ingrese la estructura inicial en el software. En aras de la simplicidad, el grupo de lentes correctores se divide en potencias positiva, negativa, negativa y positiva, y los 19,8 mm delante del núcleo del detector (donde está la pantalla fría) se configuran como pupila de salida (o STOP). del sistema.
Edite la función de ventaja para controlar el grosor de la lente, el intervalo, la distancia focal, la distorsión y la calidad de la imagen, etc., e intente controlar la pupila de entrada para realizar el trazado de rayos cerca del espejo principal. Los resultados del diseño se muestran en la Tabla 2.
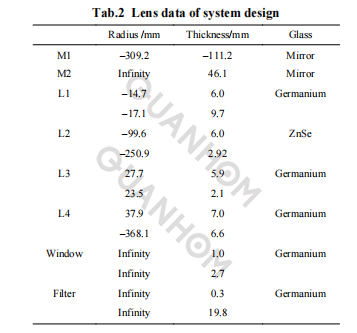
La Figura 3 es el diagrama de trayectoria óptica de la cámara infrarroja, el espejo primario es un paraboloide, el espejo secundario es un plano, la superficie frontal del espejo 1 y la superficie trasera del espejo 3 en el grupo de espejos correctores son superficies cuádricas, y la La longitud axial total del sistema es de 125 mm.
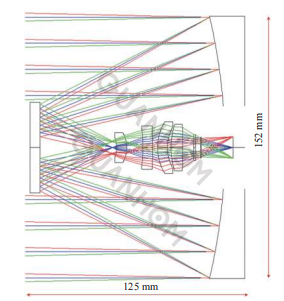
Fig.3 Diseño 2D
Como se muestra en la Figura 4, los valores de MTF de cada campo de visión en el rango espectral de 8-12,5 μm están cerca del valor limitado por difracción en la frecuencia de Nyquist, todos superiores a 0,4; la distorsión del sistema es inferior al 2,8% en todo el campo de visión.

3. Análisis de viabilidad de ingeniería.
3.1 Análisis de tolerancia
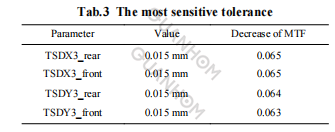
El análisis de tolerancia tiene como objetivo proporcionar valores de referencia de control de precisión para el mecanizado de piezas optomecánicas y el ensamblaje de componentes. El sistema establece la forma de la superficie, la excentricidad e inclinación de la superficie, la excentricidad e inclinación del elemento, el espesor central y el intervalo de la lente óptica, establece la variable de compensación del plano focal, obtiene los parámetros más sensibles mediante el análisis aleatorio Monte Carlo y ajusta los parámetros sensibles a hacer Monte Carlo El análisis de Lowe resultó en una reducción de la correspondencia de menos del 15%.
Se lleva a cabo el análisis de tolerancia de todo el sistema y los elementos de tolerancia sensibles se enumeran en la Tabla 3. El descentrado de la superficie (TSD) y la inclinación (TST) de la tercera lente curva son más sensibles, a los que se debe prestar atención durante el Desarrollo de sistemas optomecánicos. Las tolerancias restantes no enumeradas son más generales.
3.2 Análisis de adaptabilidad de la temperatura.
Sin control térmico, la temperatura ambiente de trabajo del módulo optoelectrónico a bordo del UAV es de aproximadamente –40~60 ℃. Sin embargo, considerando el costo y el volumen de recursos proporcionados al sistema óptico por la cápsula optoelectrónica, el esquema de diseño térmico es: control térmico primario combinado con diseño óptico adaptativo dentro de un rango de temperatura limitado. Es decir, la temperatura en la cápsula fotoeléctrica se controla entre 15 y 25 ℃ mediante control térmico primario (la diferencia de temperatura radial es inferior a 2 ℃ y la diferencia de temperatura axial es inferior a 5 ℃).
En este rango de temperatura, se requiere la deriva de temperatura de la superficie de la imagen del instrumento para cumplir con los requisitos de resolución espacial sin enfoque. De esta manera, el control térmico preliminar es más fácil de lograr, lo que no sólo reduce la presión sobre el sistema óptico, sino que también reduce el costo, y el rendimiento del sistema puede cumplir con los requisitos de la solicitud de préstamo.
El grupo de lentes correctores puede disipar eficazmente la diferencia de calor en el rango de temperatura de trabajo anterior mediante la combinación de materiales y la distribución de energía óptica y tiene las características de estructura simple y peso y volumen pequeños.
El material optomecánico del sistema principal está hecho de aluminio, el grupo de lentes correctores utiliza cuatro lentes de germanio, seleniuro de zinc, germanio y germanio, y la estructura del cilindro de la lente está hecha de aluminio. El esquema de adaptabilidad ambiental de la cámara consiste en adoptar el control térmico primario y el diseño de adaptabilidad óptica dentro de un rango de temperatura limitado. Pese los recursos de volumen proporcionados por la cápsula optoelectrónica al sistema óptico y controle la temperatura en la cápsula optoelectrónica entre 15 y 25 °C mediante control térmico primario.
El espejo ciego del sistema principal y la estructura de la cámara están hechos de aluminio y el peso de la cámara es de 1,8 kg (incluido el detector). La temperatura de referencia se establece en 20 °C, la diferencia de temperatura radial es de 2 °C y la diferencia de temperatura axial es de 5 °C. Todas las funciones de transferencia óptica son mayores que 0,3 en la frecuencia de Nyquist, como se muestra en la Fig. 6 (a). Además, las funciones de transferencia correspondientes a los puntos de temperatura en ambos extremos de la simulación del software a 15 °C y 25 °C son todas mayores que 0,33, como se muestra en las figuras 6 (b) y (c).
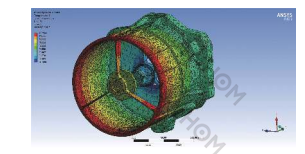
Fig.5 Modelo de análisis de elementos finitos
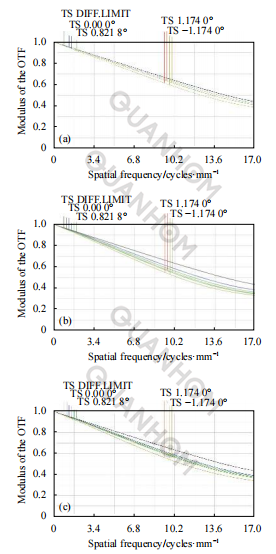
Fig.6 Simulación de la función de transferencia
4. Procesamiento de experimentos de inspección, montaje y obtención de imágenes.
4.1 Inspección de procesamiento óptico
Los espejos del sistema principal y las lentes del grupo de espejos correctores se procesan mediante tecnología de torneado de diamante de un solo punto (SPDT) [12-14]. El espejo primario y el espejo secundario de la óptica primaria están hechos de aluminio óptico T6061, como se muestra en la Figura 7.
Después del torneado y pulido, la precisión de la forma de la superficie mejora aún más, siendo ambos mejores que λ/20@632,8nm; Todas las lentes son superficies esféricas o asféricas rotacionalmente simétricas. La pieza en bruto del espejo está hecha de seleniuro de germanio o zinc. El material infrarrojo con apertura pequeña es fácil de procesar y la precisión de la forma de la superficie es mejor que 1/20λ@632,8nm.
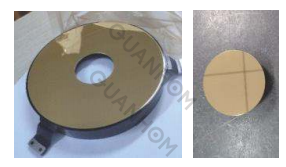
Fig.7 Espejos primario y secundario
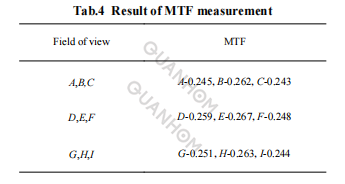
Se seleccionaron 9 puntos en el plano holográfico y se calculó el MTF según la fórmula (7) según el valor DN de la imagen objetivo. La función de transferencia del detector se calcula en 0,6 y, considerando que la rendija es ligeramente más ancha, la MTF óptica del sistema puede alcanzar el 85% del valor de diseño, lo que se encuentra dentro del rango aceptable.
4.3 Experimento de imágenes exteriores.
El sitio del experimento de imágenes de ubicación del sistema está en el noveno piso del edificio y el momento del experimento es una tarde de invierno. El diagrama de imágenes del sistema se muestra en la Figura 10. El punto a en la escena es un edificio residencial a una distancia de 2 km, con contornos claros y detalles precisos; el punto b es una tubería de un edificio residencial a una distancia de 1 km, con una escala de aproximadamente 0,1 m, que se puede distinguir claramente; el punto negro en c en la esquina inferior izquierda de la imagen es la unidad exterior del aire acondicionado en invierno, y la parte negra en la esquina superior derecha es el cielo.
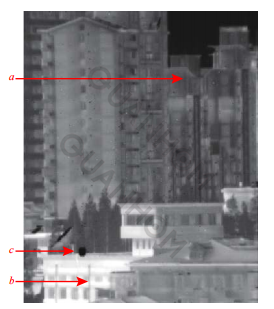
Fig.10 Imagen de escena
5. Conclusión
Con el objetivo de satisfacer los requisitos de detección infrarroja de las cápsulas optoelectrónicas en miniatura transportadas por vehículos aéreos no tripulados, se diseñó y desarrolló un sistema de imágenes ópticas infrarrojas de onda larga para aplicaciones de detectores de refrigeración. Una estructura plegada newtoniana reemplaza la estructura de casete comúnmente utilizada, y la corrección de la calidad de la imagen de un campo de visión más amplio se logra simplificando la estructura del telescopio principal y agregando una superficie asférica al grupo de espejos de corrección.
El sistema principal adopta un diseño de estructura optomecánica totalmente de aluminio, y los componentes ópticos de todo el sistema se procesan mediante tecnología de torneado de diamante de un solo punto, lo que reduce la dificultad de procesamiento, ensamblaje y desarrollo y costos de desarrollo; El diseño con efecto de pantalla 100% fría se logra mediante imágenes secundarias, que reducen el fondo térmico infrarrojo, lo que es beneficioso para mejorar la sensibilidad del sistema. El sistema óptico tiene las características de tamaño pequeño, estructura compacta y excelente calidad de imagen.
Los resultados finales de las pruebas de instalación y puesta en servicio del sistema muestran que la calidad de la imagen cumple con las expectativas de diseño y cumple con los requisitos de los indicadores técnicos del proyecto. Este artículo tiene cierta importancia de referencia para el diseño y desarrollo de un sistema óptico infrarrojo compacto para la detección de infrarrojos similar al módulo optoelectrónico en miniatura transportado por un UAV.
Somos un fabricante experimentado deComponentes optoelectromecánicos, dedicado a proporcionar a los usuarios una variedad de lentes de imágenes térmicas infrarrojas de alta calidad. Tomamos las necesidades de los clientes como primera prioridad y controlamos exhaustivamente la calidad de nuestros productos. Por esta razón, contamos con un estricto sistema de inspección de calidad para controlar el diseño, fabricación y exportación de los productos. Si está interesado en nuestra lente termográfica infrarroja, ¡póngase en contacto con nosotros de inmediato!
Autores: Hao Siyuan, Xie Jianan, Wen Maoxing, Wang Yueming, Yuan Liyin
Fecha de recepción: 2020-01-17; Fecha de revisión: 2020-02-08
Fuente de la revista: Vol.49 No.9 Ingeniería láser e infrarroja, septiembre de 2020
Referencias:
[1] Cao Yinqi, Qi Yuan, Cheng Gang, et al. Desarrollo y tecnologías clave de pequeñas cápsulas fotoeléctricas para drones militares [J].Aircraft Missiles, 2019(3): 54-59. (en chino)
[2] Zhou Feng, Liu Jianhui, Guo Jun, et al. Análisis del desarrollo de sistemas extranjeros de alerta temprana por infrarrojos aerotransportados [J]. Láser e infrarrojos, 2017, 47(4): 399-403. (en chino)
[3]Li Lei, Xu Yue, Jiang Qi y otros. Descripción general del desarrollo de tecnología y equipos de vehículos aéreos no tripulados militares extranjeros en 2018 [J]. Tecnología de misiles tácticos, 2019(2): 1-11. (en chino)
[4]Gao Sifeng, Wu Ping, He Manali, et al. Estimación de la distancia de trabajo del sistema infrarrojo en condiciones atmosféricas complejas [J]. Ingeniería láser e infrarroja, 2008, 37(6): 941-944. (en chino)
[5] Shi Guanghui. Utilizando la óptica gaussiana y la teoría de la aberración de tercer orden para encontrar la solución inicial de un objetivo con zoom [J]. Óptica de China, 2018, 11(6): 1047-1060. (en chino)
[6] Chen Li, Liu Li, Zhao Zhicheng y otros. Diseño de sistema óptico de cuatro espejos coaxiales de longitud focal larga [J]. Ingeniería láser e infrarroja, 2019, 48(1): 0118002. (en chino)
[7] Bai Yu, Liao Zhiyuan, Li Hua, et al. Diseño y análisis de un sistema de imágenes atérmicas para detección infrarroja de onda media reflectante plegada [J]. Ingeniería láser e infrarroja, 2015, 44(2): 407-412. (en chino)
[8] Jiang Kai, Zhou Sizhong, Li Gang y otros. Diseño sin calor de un sistema plegable de zoom de campo de visión infrarrojo dual de onda media [J]. Ingeniería de infrarrojos y láser, 2013, 42(2): 403-407. (en chino)
[9] Xiao Guanghui, Hao Peiming. Diseño de un sistema óptico de Newton sin placa correctora de potencia [J]. Óptica Aplicada, 2008, 29(5): 753-757. (en chino)
[10] Mu Yongji, Mao Yijiang, Hu Mingyong. Diseño de un grupo de espejos de corrección de aberración de espejo parabólico fuera de eje [J]. Acta Óptica Sínica, 2014, 34(6): 227-232. (en chino)