Diseño de un sistema de enfoque de campo dual infrarrojo basado en DSP
- participación
- Tiempo de Publicación
- 2022/4/12
Resumen
Los sistemas infrarrojos de doble campo se utilizan ampliamente en equipos de reconocimiento optoelectrónico. En este artículo, de acuerdo con las características de funcionamiento del sistema óptico infrarrojo de campo dual, se diseña un conjunto de sistemas de enfoque de lentes ópticas basados en DSP.
El sistema óptico infrarrojo de campo dual puede proporcionar dos imágenes con diferentes aumentos y diferentes campos de visión al mismo tiempo. Un campo grande en el sistema tiene baja resolución y se utiliza para buscar objetivos en un rango amplio; Se utiliza un pequeño campo para identificar, analizar y confirmar objetivos específicos. Por lo tanto, el sistema de campo de visión dual infrarrojo se usa ampliamente en equipos de reconocimiento optoelectrónicos aerotransportados, montados en vehículos y otros.
En este artículo, de acuerdo con las características de funcionamiento y requisitos técnicos del sistema óptico infrarrojo de campo dual, se diseña un conjunto de sistemas de enfoque de lentes ópticas basados en DSP. Al aplicar la idea de diseño de integración optomecánica, las funciones de cambio rápido y enfoque de campos de visión grandes y pequeños se realizan mediante el movimiento paralelo del grupo de lentes ópticas a lo largo del eje.
1 El diseño del sistema de enfoque.
1.1 Selección del método de enfoque
Por lo general, el sistema de zoom de campo de visión dual se divide en dos categorías: en la lente infrarroja de campo de visión dual , grupo de lentes ópticas que se mueven hacia adentro y hacia afuera, sistema de zoom conmutado y sistema de zoom de dos posiciones. El sistema de zoom conmutable requiere insertar parte de la lente en la posición adecuada para cambiar la distancia focal del sistema óptico, por lo que el tamaño lateral es grande. El sistema de posición dual cambia la distancia focal del sistema cambiando la distancia axial del grupo de lentes, lo que puede reducir efectivamente el volumen del sistema y puede realizar las funciones de cambio de campo de visión y enfoque preciso al mismo tiempo. .
Teniendo en cuenta los requisitos de calidad y tamaño del espacio del sistema general, se adopta un sistema de zoom de doble posición que mueve el grupo de lentes ópticos en paralelo a lo largo del eje. El sistema de zoom de dos posiciones consta de un grupo fijo frontal, un grupo de lentes móviles y un grupo fijo trasero. Su principio de funcionamiento se muestra en la Figura 1. Cuando el grupo de lentes móviles está en la posición 1, el sistema está en un estado de distancia focal corta (gran campo de visión), y cuando el grupo de lentes móviles está en la posición 2, el sistema está en un estado de distancia focal larga (campo de visión pequeño).
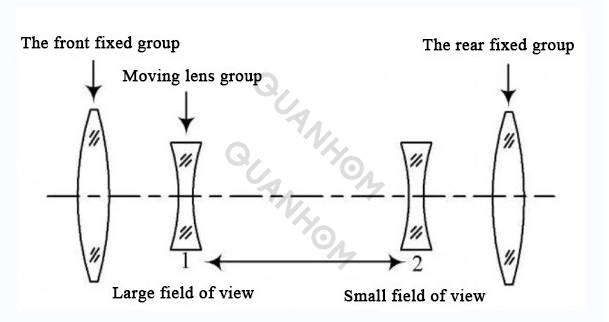
Figura 1 Diagrama esquemático de la óptica infrarroja de campo dual.
1.2 Diseño del sistema de movimiento de enfoque.
Todo el sistema de movimiento de enfoque está compuesto por un sistema de control de circuito cerrado con un módulo de control DSP como núcleo. El diagrama esquemático del sistema se muestra en la Figura 2. Se compone principalmente de las siguientes partes: módulo de control DSP, servomotor, husillo, módulo deslizante, guía lineal de precisión, regla de rejilla lineal, etc. El módulo DSP controla la rotación. del motor después de aceptar el comando de control de la computadora host y cambia el movimiento de rotación del motor al movimiento lineal axial del grupo de espejos móviles a través del mecanismo de movimiento de la guía de tornillo. La regla de rejilla lineal detecta la posición actual del grupo de lentes deslizándose y la devuelve al DSP. El módulo de control DSP compara la posición actual del grupo de lentes en movimiento con la posición dada del sistema, y controla además el motor para hacer que el grupo de lentes se mueva a lo largo de la dirección axial hasta que el grupo de lentes en movimiento alcance la posición dada del sistema.
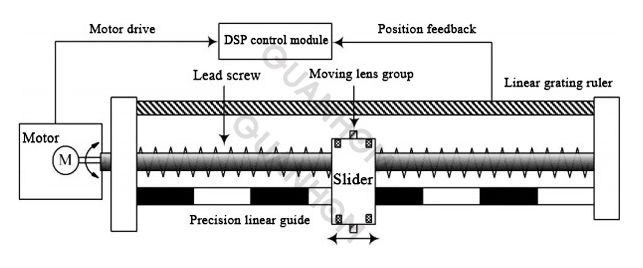
Figura 2 Diagrama esquemático del sistema de enfoque.
2 Centrándose en el diseño del hardware del sistema
El circuito de hardware del sistema de enfoque se basa en el controlador DSP. TMS320LF 2407A es un procesador de señal digital de punto fijo de 16 bits. Integra capacidades de procesamiento de señales digitales de alta velocidad y circuitos periféricos optimizados adecuados para el control de motores, proporcionando al control del motor un conjunto de soluciones digitales con alta precisión y alto rendimiento al mismo tiempo. El diseño del circuito periférico del sistema de control gira en torno al TMS320LF 2407A, que se compone principalmente de las siguientes partes básicas: el circuito de interfaz de comunicación en serie con la computadora host, el circuito de alimentación y el circuito de detección de posición, etc. El diagrama de bloques del sistema de control se muestra en la Figura 3.

Figura 3 Diagrama de bloques del hardware del sistema de control DSP
2.1 Circuito de comunicación serie SCI
El sistema puede realizar la comunicación entre DSP y la computadora host a través del módulo de comunicación serial SCI integrado por el chip TM S320LF 2407A. El circuito adopta la computadora host del chip controlador MAX232 que cumple con el estándar RS232 para enviar comandos de control al módulo de control DSP. El sistema DSP responde a los comandos de control calculando la posición dada del grupo de lentes en movimiento, controlando el movimiento del motor para completar el enfoque del sistema y, mientras tanto, enviando retroalimentación del estado de funcionamiento actual del sistema de control de enfoque a la computadora principal.
2.2 Circuito de detección de posición
La clave para un control preciso de la posición del grupo de lentes en movimiento es la detección de su desplazamiento. Se selecciona la regla de rejilla de precisión RGH22 de Renishaw Company en el Reino Unido como sensor de posición con una resolución de 2 μm. La señal de salida es de dos cambios de frecuencia y ortogonal (es decir, un pulso con una diferencia de fase de 90°). Su cabezal lector dispone de cero de referencia y finales de carrera dobles. El cero de referencia proporciona un origen de referencia repetible o punto cero, y el interruptor de límite puede emitir una señal cuando el movimiento axial alcanza los puntos límite en ambos extremos para detener el motor.
Cada administrador de eventos EV del TMS320LF 2407A contiene un circuito de pulso decodificado en cuadratura QEP, que puede codificar y contar los pulsos de entrada decodificados en cuadratura generados por la regla de rejilla. Después de que la regla de rejilla genera el pulso de codificación de cuadratura y lo envía al circuito de codificación de cuadratura, el circuito QEP puede determinar la dirección de movimiento del grupo de lentes en movimiento detectando la secuencia de las dos secuencias y el desplazamiento actual y la velocidad del espejo en movimiento. El grupo se puede calcular mediante el recuento de pulsos y la frecuencia del pulso. Dado que la salida de la rejilla, la regla es una señal de nivel digital de 5 V y el DSP solo puede aceptar la señal de nivel de 3,3 V, el chip SN74LV C245 se utiliza como circuito de interfaz de conversión de nivel entre el DSP y el cabezal de lectura de la rejilla.
2.3 Circuito de accionamiento del motor
En el sistema de enfoque, la señal PWM emitida por el DSP después de procesar la información recopilada no es suficiente para accionar el motor directamente, y se necesita un chip controlador para convertirla en una señal de accionamiento que pueda accionar el motor. El circuito de accionamiento del motor adopta el chip de accionamiento del motor L298N de SGS Company. Es un chip de motor de doble puente H con voltaje y corriente constantes, que puede controlar dos motores de CC al mismo tiempo y la corriente de salida puede alcanzar 2A. Para reducir la influencia del circuito de control en el sistema de control, la señal PWM generada por el DSP está aislada optoelectrónicamente mediante el optoacoplador TLP521 y luego se envía al chip de control L298, lo que hace que la señal de control del sistema sea estable y confiable. Además, en la práctica, para proteger el motor, se deben agregar dos grupos de diodos de rueda libre al circuito de accionamiento.
3 resultados experimentales
La banda de trabajo del sistema óptico infrarrojo de campo dual es de 3 a 5 μm. El ancho del campo de visión es de 24°×18° y el campo de visión estrecho es de 4°×3°. La distancia focal corta es de 20 mm y la distancia focal larga es de 145 mm. La distancia de conmutación entre campos de visión grandes y pequeños es de 125 mm y la precisión de posicionamiento requerida del grupo de lentes móviles es inferior a 20 μm. A través de pruebas experimentales, el sistema de enfoque puede cambiar entre campos de visión grandes y pequeños en 1 segundo, y la precisión de enfoque puede alcanzar los 5 μm, lo que cumple con la precisión de posicionamiento requerida por el sistema. La Figura 4 muestra las imágenes del sistema óptico infrarrojo bajo campos de visión grandes y pequeños, respectivamente.

Figura 4 Imágenes de campo de visión grande y pequeño del sistema óptico
4. Conclusión
Este artículo presenta un sistema de control de enfoque de lente óptica infrarroja de campo dual, que adopta el movimiento axial del grupo de lentes móviles para realizar el zoom. Sólo se necesita un conjunto de dispositivos electromecánicos para realizar las funciones de conmutación y enfoque del campo de visión al mismo tiempo, controlando así de manera efectiva las dimensiones axiales, haciendo que su estructura sea más compacta. El sistema de control adopta el chip TMS320LF 2407A de alto rendimiento como unidad de control del sistema, lo que hace que el diseño de todo el circuito de hardware sea simple y confiable. Cumple con los requisitos del sistema de imágenes ópticas infrarrojas para un cambio rápido del campo de visión y una alta precisión de enfoque.
Quanhom es un proveedor profesional de componentes de sistemas y lentes infrarrojos personalizados . Nuestro equipo de investigación y desarrollo de última generación se destaca en el diseño y la fabricación a la perfección de sus conceptos de productos de óptica infrarroja térmica. Desde simples subconjuntos de elementos de lentes infrarrojas hasta complejos conjuntos optomecánicos y electroópticos complejos, sofisticados y confiables. Si lo necesita, póngase en contacto con nosotros .
Referencias
[1] Ren Deqing. El diseño óptico de la lente infrarroja de doble campo [J]. Tecnología infrarroja, 1998,20(3):19-22.
[2] Chen Lvji. Sistema óptico infrarrojo de doble campo de visión para cámara termográfica de plano focal no refrigerada[J]. Tecnología infrarroja, 2007,29(11):645-647.
[3] Yang Yulong, Guan Fulin, Zhang Tuqiao, et al. Diseño de modelo y control del mecanismo de enfoque del espejo de imágenes del telescopio solar espacial [J]. Ingeniería mecánica de China, 2006, 8(17): 313-316.
[4] Liu Heping, Yan Liping, Zhang Xuefeng y otros. Principio estructural del TM S320LF240x DSP
y aplicación [M]. Beijing: Prensa de la Universidad de Aeronáutica y Astronáutica de Beijing, 2002.
[5] Liu Jinkun. Simulación Matlab de Control PID Avanzado [M]. Beijing: Electronic Industry Press, 2004.
[6] Hu Jin, Zhong Xingrong, Wang Jiajun. Investigación sobre imágenes del infrarrojo cercano basada en el método del dominio de la frecuencia
[J]. Tecnología electrónica moderna, 2007, 30 (22): 125-126.
[7] Li Yunhong, Li Junhua, Li Pei. Aplicación de la tecnología de imágenes térmicas infrarrojas en centrales eléctricas [J].
Tecnología electrónica moderna, 2008, 31(6):181-183.