El principio de funcionamiento y la composición del sensor de infrarrojos.
- participación
- Editor
- Mikasa Tang
- Tiempo de Publicación
- 2022/8/5
Resumen
El sensor de infrarrojos es una de las principales unidades funcionales del sistema de infrarrojos. Su tarea principal es detectar varios objetivos dinámicos y estáticos y transmitir las señales del objetivo detectado a una unidad de procesamiento de imágenes e información infrarroja para su procesamiento. Entonces, este artículo presenta brevemente el principio de funcionamiento y la composición del sensor de infrarrojos.
El principio de funcionamiento y la composición del sensor de infrarrojos.
1. El principio de funcionamiento del sensor de infrarrojos.
Después de que la radiación infrarroja del objetivo y el fondo pasa a través de la lente del objetivo, se genera una imagen en el plano focal del componente de detección. El componente de detección de infrarrojos convierte la radiación infrarroja en señales eléctricas y preprocesa el circuito a través de la señal infrarroja. Después de que la señal infrarroja se somete a muestra doble correlacionada (CDS), se realiza el filtrado electrónico y la conversión A/D, NUC, eliminación de defectos y clasificación de síntesis. Luego, la señal digital paralela se envía a la unidad de procesamiento del objetivo potencial a través de una línea de transmisión de cierta distancia para su posterior procesamiento.
2. Los componentes del sensor de infrarrojos.
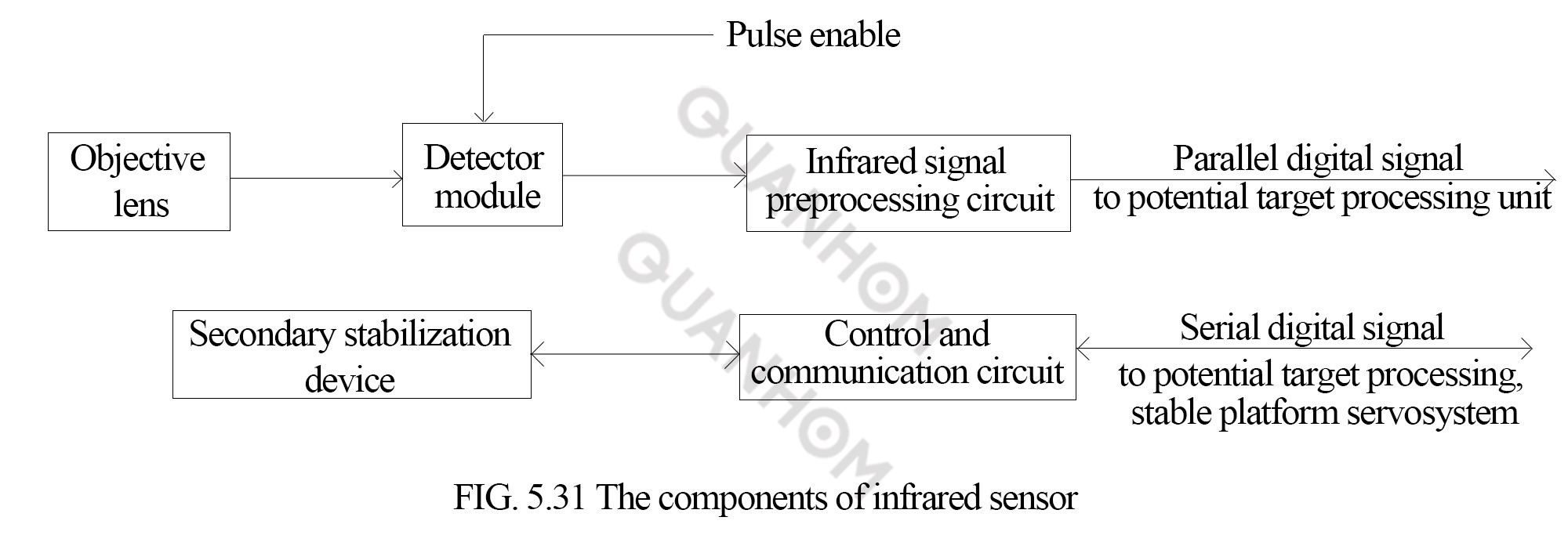
El sensor de infrarrojos está compuesto por una lente objetivo (sistema óptico de infrarrojos), un módulo detector de infrarrojos, un circuito de preprocesamiento de señales de infrarrojos, un dispositivo de estabilización secundario y un circuito de control y comunicación. Se muestra en la FIG. 5.31.
2.1 Lente objetivo
La lente objetivo del sensor de infrarrojos tiene altos requisitos en cuanto a calidad de imagen y eficiencia óptica, y el diseño óptico clásico no puede garantizar la eficiencia óptica de la lente objetivo. Por tanto, la lente objetivo debería diseñarse como un sistema óptico de transmisión asférico. El diseño está fabricado con una variedad de materiales para corregir la aberración cromática en la banda de trabajo.
2.2 Componentes de detección de infrarrojos
Un componente de detección de infrarrojos consta de las siguientes partes:
(1) Componente ID TL005 288×4 LWIR IDDCA.
(2) Circuito generador de impulsos de reloj del detector: genera la señal de impulso necesaria para garantizar el funcionamiento normal del detector.
(3) Circuito de polarización del detector: genera el voltaje de polarización requerido por el funcionamiento normal del detector.
(4) Circuito generador de habilitación de pulso, la señal de habilitación de pulso del circuito de lectura CCD del detector generada por el sistema de medición de ángulo, llegada de habilitación de pulso, el circuito generador de pulso de reloj es para generar la señal de pulso requerida por el CCD.
3. Circuito de preprocesamiento de señal infrarroja
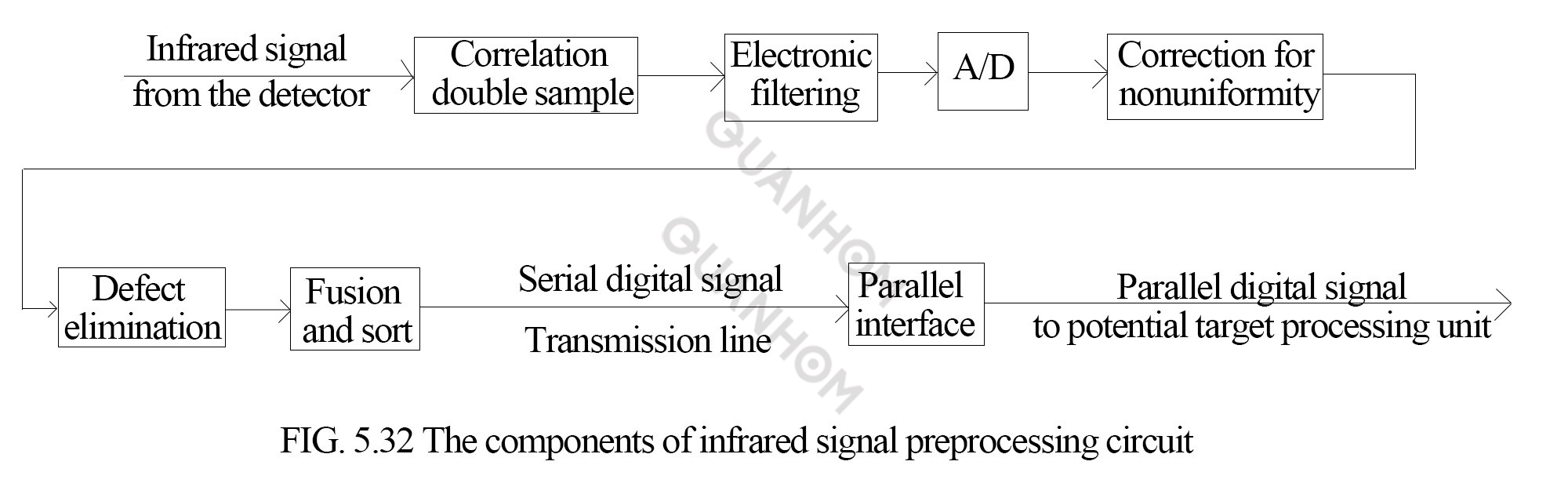
(1) CDS : se aplica a la señal de salida del detector para filtrar el ruido de conmutación generado por el circuito de lectura del detector.
(2) Filtrado electrónico: puede filtrar el ruido de baja frecuencia, suprimir el ruido de alta frecuencia y mejorar la relación señal-ruido.
(3) Conversión A/D: se puede utilizar para convertir señales infrarrojas en cantidades analógicas/digitales y el nivel de cuantificación es de 12 bits.
(4) NUC: puede corregir la señal de salida de cada uno de los 288 canales del detector. Para conseguir que bajo la acción de la misma energía de radiación infrarroja, la no uniformidad de las señales generadas por cada canal sea inferior al 0,5%. Para detectores con respuesta lineal, es suficiente realizar una corrección de dos puntos de responsividad y punto de polarización; para detectores con respuesta no lineal, se requiere un algoritmo de aproximación lineal por partes multipunto para la corrección. Dado que un determinado tipo de sistema de infrarrojos necesita cubrir 360°, no es posible incorporar una referencia de temperatura al sistema. A través de la investigación sobre la aproximación lineal por partes de dos puntos y múltiples puntos y la compensación de no uniformidad basada en escenas, las condiciones de trabajo son benignas, luego se desarrolla el hardware general que puede realizar estos tres algoritmos.
(5) Eliminación de defectos: se reemplaza por el promedio de señal de dos canales sin defectos en la vecindad de defectos para lograr la eliminación de defectos.
(6) Fusión y clasificación: la señal de la columna anterior se retrasa, lo que equivale al tiempo entre dos columnas adyacentes. Después del procesamiento compuesto de las dos columnas, se forma una columna de señales para completar la fusión y clasificación.
(7) Interfaz paralela: sirve para enviar la señal infrarroja digital, la señal de sincronización de píxeles y la señal de sincronización de columna a la unidad de procesamiento de objetivo potencial en paralelo, y recibir simultáneamente la señal de sincronización de columna desde la unidad de goniómetro.
4. Circuitos de control y comunicación.
Funciones :
(1) Recibir una señal de control (incluida una señal de control de corrección de uniformidad, una señal de control de autoverificación y una señal de control de ganancia) de la unidad de procesamiento de objetivo potencial y enviar una señal de resultado de autoverificación a la unidad de procesamiento de objetivo potencial.
(2) Reciba la señal de actitud de la plataforma desde el servosistema estabilizado de la plataforma.
(3) Controlar el dispositivo de estabilización secundario.
(4) Controlar el circuito de preprocesamiento de la señal infrarroja.
5. Dispositivo estabilizador secundario
El dispositivo de estabilización secundaria consta de un espejo, un giroscopio, un servomotor y un circuito de accionamiento. Su función es realizar una estabilización secundaria precisa del eje óptico infrarrojo.