¿Qué son los píxeles muertos, las imágenes fantasma y el efecto de tapa de olla en las imágenes infrarrojas?
- participación
- Tiempo de Publicación
- 2023/11/14
Resumen
Este artículo presentará varios fenómenos de imagen que ocurren a menudo en imágenes infrarrojas: píxeles muertos, imágenes fantasma y el efecto de tapa de olla. Y se dan algunos métodos para solucionar estos defectos, tales como: corrección de no uniformidad, compensación, SDRAM y FLASH.

Este artículo presentará varios fenómenos de imagen que ocurren a menudo en imágenes infrarrojas: píxeles muertos, imágenes fantasma y el efecto de tapa de olla. Y se dan algunos métodos para solucionar estos defectos, tales como: corrección de no uniformidad, compensación, SDRAM y FLASH.
Los píxeles muertos se refieren a puntos claros y oscuros cuyas coordenadas no cambian con el objetivo en la imagen infrarroja. Los píxeles muertos también se denominan píxeles no efectivos (incluidos los píxeles sobrecalentados y los píxeles muertos). Los píxeles cuyo voltaje de ruido es superior a 10 veces el voltaje de ruido promedio se denominan píxeles sobrecalentados (puntos blancos) y los píxeles cuya tasa de respuesta es inferior a 1/10 de la tasa de respuesta promedio se denominan píxeles muertos (puntos negros).
Tasa de respuesta de píxeles : es el voltaje de la señal de salida generado por el plano focal por unidad de potencia de radiación dentro del rango dinámico bajo un determinado período de cuadro o período de línea.
(El escaneo de izquierda a derecha a menudo se denomina escaneo horizontal o escaneo de líneas, mientras que el escaneo de arriba a abajo generalmente se llama escaneo vertical o escaneo de cuadros)
Causas de los píxeles muertos
Los defectos en el proceso de matriz formado por cada punto colector de luz en el detector de infrarrojos, o errores en el proceso de conversión de la señal óptica, provocarán errores de información en algunos píxeles de la imagen, lo que dará como resultado valores de píxeles inexactos en la imagen. Estos píxeles defectuosos son imperfecciones en la imagen.
Además, el uso prolongado de imágenes infrarrojas en entornos de alta temperatura puede provocar un aumento en la cantidad de puntos defectuosos en el detector de infrarrojos. Esto puede provocar una degradación de la claridad de la imagen, la integridad de las imágenes térmicas infrarrojas y la precisión de la medición de la temperatura por infrarrojos.
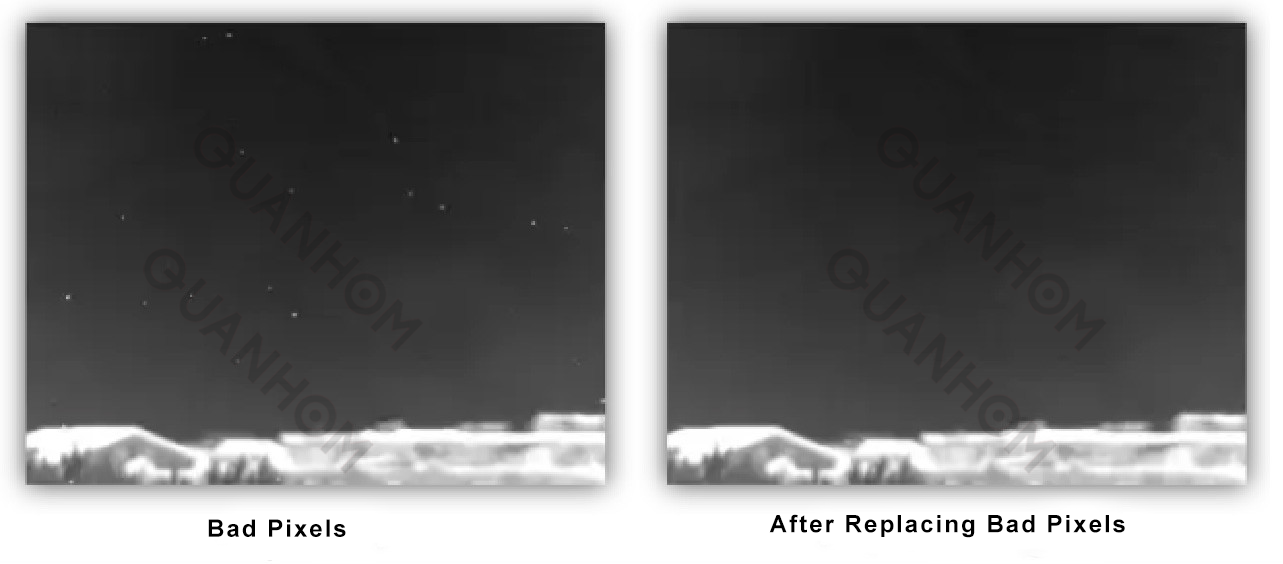
Métodos de reemplazo de píxeles muertos comúnmente utilizados : reemplazo del punto izquierdo, reemplazo del punto superior, reemplazo de la mediana o la media del vecindario, etc.
El principio de eliminación de píxeles muertos es reemplazar el valor del píxel muerto con los valores de los píxeles circundantes. Debe determinar la ubicación de los píxeles muertos en una imagen y utilizar una lente infrarroja que se calibrará para capturar imágenes de cuerpo negro a diferentes temperaturas. La respuesta de los píxeles muertos a la temperatura es obviamente diferente a la de los píxeles normales. Luego marque las coordenadas de estos puntos y use los píxeles circundantes para reemplazarlos.
En la operación real, el efecto de reemplazar con el valor medio no es tan bueno como reemplazarlo con el valor medio de los píxeles circundantes, porque muchos píxeles muertos del detector de infrarrojos suelen aparecer concentrados y puede haber píxeles muertos alrededor de un píxel muerto. El uso del reemplazo mediano puede reducir el impacto de los píxeles muertos circundantes en el efecto de reemplazo.
2.Imágenes fantasma
Las imágenes fantasma se refieren a líneas brillantes u oscuras que aparecen en imágenes infrarrojas y no cambian con el objetivo, que aparece con un halo tenue.

Causa : Es causado por la tasa de respuesta desigual del elemento de detección del detector de infrarrojos a la radiación infrarroja.
Características de las imágenes fantasma : su profundidad y detalle varían según la escena y el clima, pero la forma general es consistente en el mismo detector.
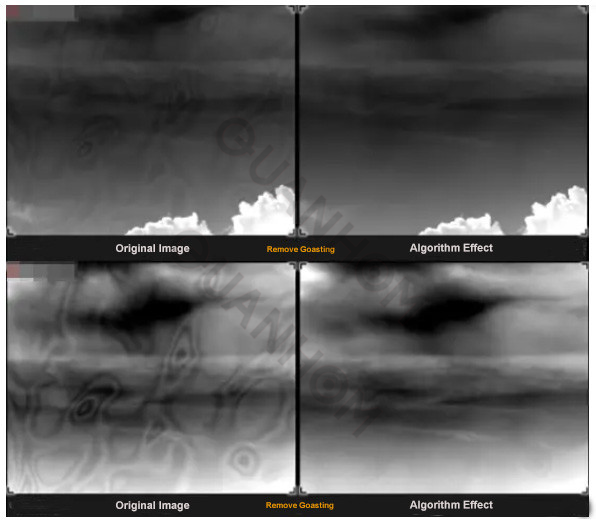
Método de calibración : Se puede solucionar realizando una calibración de dos puntos en el sitio. Generalmente, durante la calibración en sitio, apunte a un objetivo de baja temperatura, como un cielo limpio y sin nubes, y presione la tecla de compensación designada; luego apunte a un objetivo con una temperatura relativamente alta (puede elegir la tapa de la lente cerrada) y presione una tecla de compensación. Una vez completada la compensación, el sistema calculará automáticamente el valor K del coeficiente de corrección en función del fondo recopilado por la compensación y realizará una corrección de dos puntos para eliminar las imágenes fantasma.
Antecedentes : generalmente se refiere a los valores relevantes generados por el propio entorno natural sin interferencia humana externa.
3.Efecto de tapa de olla
Factores como el cambio del campo de visión, el ajuste del enfoque, la temperatura ambiente, los golpes y la vibración de la imagen térmica provocarán cambios obvios en la falta de uniformidad introducida por el sistema óptico, lo que dará como resultado que la imagen de salida de la imagen térmica a menudo se muestre negra en el centro y brillante en los bordes y esquinas de la pantalla. El fenómeno se llama efecto tapa de olla.

Durante el proceso de uso, la temperatura del cilindro del sistema óptico aumenta, lo que hace que la temperatura del borde de la lente sea mayor que la del centro, o la radiación térmica del cilindro llega al detector a través de la lente óptica, lo que hace que el nivel de gris aumente gradualmente. aumentar desde el centro hasta el borde de la imagen. A medida que se utiliza el instrumento por más tiempo, el cilindro de la lente se calienta más y el efecto de tapa de olla se vuelve más severo.
Un método para suprimir el "efecto tapa de olla" de imágenes infrarrojas en tiempo real, que se caracteriza por los siguientes pasos:
Paso 1 : Encienda la imagen térmica infrarroja, espere hasta que la imagen esté estable, aproximadamente 5 minutos, y complete una corrección no uniforme de la imagen;
Paso 2 : Después de completar el paso 1, espere unos 15 minutos hasta que aparezca el fenómeno de la tapa de la olla y recopile la imagen del efecto de la tapa de la olla para la escena de radiación de calor uniforme;
Paso 3 : A través de la distribución estadística de histogramas, se obtiene que el punto (x0, y0) más cercano al centro de la imagen en los píxeles de la imagen relativamente oscuros se utiliza como el centro de la imagen del efecto de tapa de olla;
Etapa 4 ; Según la resolución y fórmula de la imagen.
Dmax=max Calcule el valor Dmax, Dmax es el punto más alejado de (x0, y0) entre todos los puntos de píxeles;
Paso 5 : Según el modelo matemático g (x, y) = a × r2 + b × r4, donde r es el modelo matemático relacionado con la posición de la imagen, el tamaño del paso para a y b es 0,1 y el rango es [ -2, 2], resuelva iterativamente g (x, y) y luego calcule el valor Ilight a partir de Ilight = Iin × g (x, y), donde Iin son los datos de la imagen original recopilados en tiempo real, Ilight es el ruido aditivo. eso debe ser requerido, y Iout es la imagen original; Utilice Iout=Iin-Ilight y D(Iout)=∑|Iout-Iideal| para resolver el valor D(Iin). D(Iout) es la variación entre la imagen de salida ideal y la imagen de salida real. Compare el valor D(Iin) obtenido de cada grupo de a y b, y registre la combinación de ayb con el valor más pequeño D(Iin);
Paso 6 : Utilice el centro de la tapa del recipiente de imagen (x0, y0) obtenido en el paso 3, el Dmax calculado en el paso 4 y la combinación de a y b cuando D(Iin) se minimiza en el paso 5 para calcular la Iluz de diferentes escenas. imágenes en tiempo real. Utilice lout = Iin-Ilight para suprimir el fenómeno de la tapa de la imagen en tiempo real.
4.Medidas de Prevención y Mejora
·Corrección de no uniformidad
Debido a las limitaciones del proceso de fabricación del detector de infrarrojos, cada elemento de detección del detector de infrarrojos tiene una tasa de respuesta diferente a la radiación infrarroja. Los fantasmas y píxeles muertos mencionados anteriormente aparecerán en la superficie de la imagen, lo que afectará la calidad de la imagen térmica.
Diferentes píxeles de la matriz del plano focal infrarrojo tienen diferentes amplitudes de señal de salida de vídeo bajo la misma radiación incidente uniforme. Esta es la llamada falta de uniformidad de la respuesta del conjunto del plano focal infrarrojo.
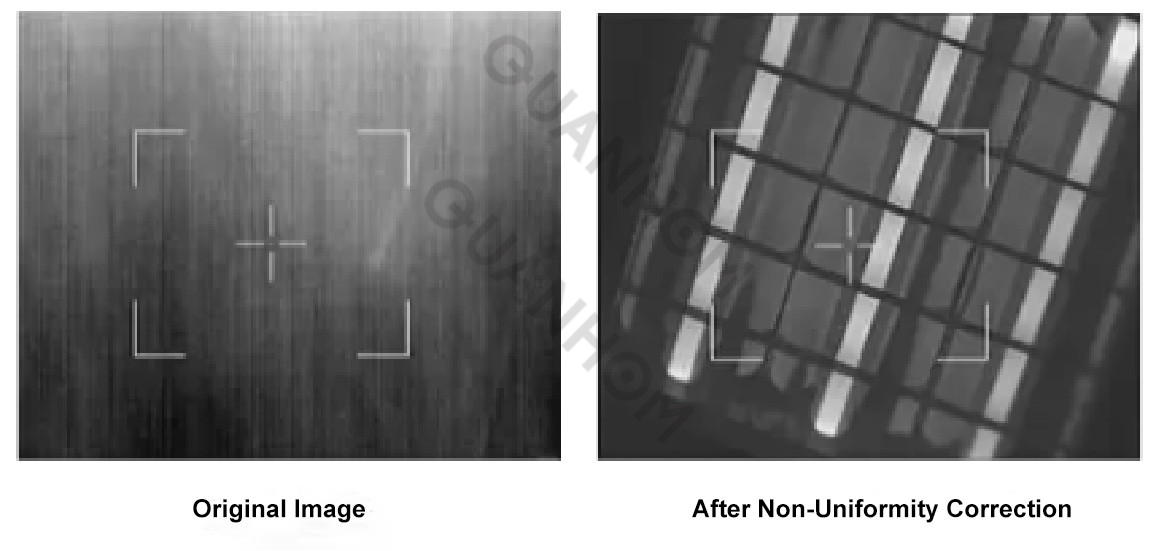
La corrección de la falta de uniformidad se refiere a un medio técnico que reduce efectivamente la falta de uniformidad de la tasa de respuesta del detector (es decir, el ruido espacial inherente del detector) y mejora la calidad de la imagen térmica.
El ruido espacial se refiere a la diferencia entre las señales de salida de diferentes píxeles cuando una imagen térmica observa un objetivo. El ruido espacial también se puede dividir en ruido espacial de baja frecuencia (ruido no uniforme) y ruido espacial de alta frecuencia (ruido de patrón fijo FPN).
Después de la corrección de la falta de uniformidad, la imagen de la imagen térmica es uniforme, los fantasmas y los píxeles muertos desaparecen y el efecto de la imagen mejora significativamente, lo que puede mejorar en gran medida la capacidad de observación de la imagen térmica.
Métodos de corrección más utilizados : corrección de un punto, corrección de dos puntos, corrección multipunto, etc.
Método de corrección de un punto: un método que puede corregir las señales de salida de cada píxel para que sean consistentes. Este enfoque consiste en corregir los valores de respuesta de diferentes píxeles al mismo valor de respuesta bajo la misma intensidad de radiación luminosa, porque están bajo la misma iluminación. Puede ser el valor promedio de la señal en este momento o el valor máximo bajo esta condición.
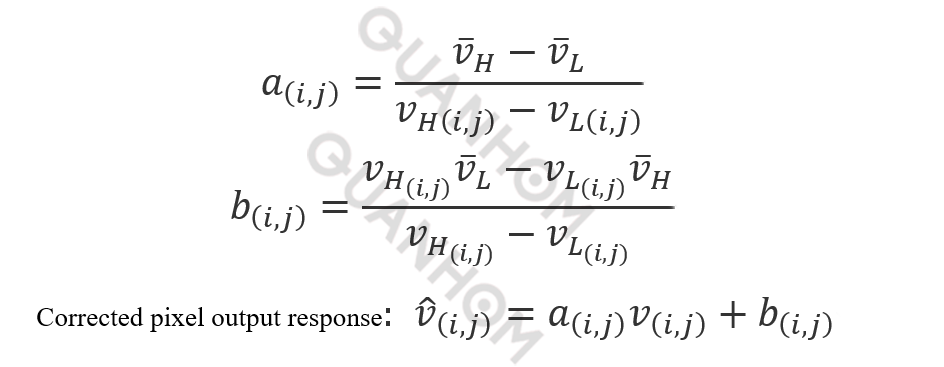
El método de corrección de dos puntos es uno de los algoritmos de corrección más utilizados. El método de implementación consiste en tomar las condiciones de radiación del cuerpo negro a dos temperaturas como puntos de calibración, utilizar el detector para obtener una imagen de radiación infrarroja uniforme cuando la fuente de radiación es un cuerpo negro a la temperatura correspondiente y calcular las respuestas de los píxeles VL(i,j). ) y VH(i,j) y las respuestas promedio de los píxeles ¯VL y ¯VH cuando las temperaturas del cuerpo negro son TL y TH. Las ganancias a(i,j) y b(i,j) de cada píxel se obtienen mediante la fórmula:
a(i,j)=¯VH-¯VL / VH(i,j)-VL(i,j)
b(i,j)= VH(i,j)^¯VL - VL(i,j)^¯VH / VH(i,j)- VL(i,j)
Respuesta de salida de píxeles corregida: ^V(i,j)= a(i,j) V(i,j)+ b(i,j)
A diferencia del método de corrección de dos puntos, que simplemente utiliza un modelo lineal para reemplazar la curva de respuesta real, el método multipunto reconoce la curva de respuesta. Para cada segmento de la polilínea, se utiliza el método de escala de dos puntos para calcular los correspondientes an(i,j) y bn(i,j), que son los números de serie del segmento de polilínea. Después de la calibración, se almacenan para las operaciones de corrección una serie de parámetros de compensación an(i,j), parámetros de ganancia bn(i,j) y respuestas de píxeles de precorrección correspondientes a los puntos finales del segmento de línea. Durante la operación de corrección, primero determine el intervalo según la respuesta de precorrección del píxel, encuentre an(i,j) y bn(i,j) correspondientes al intervalo y calcule la respuesta de salida del píxel corregido ^V( i, j).
·Compensación
La compensación se realiza para obtener los datos brutos necesarios para la corrección de la falta de uniformidad. Para obtener una imagen infrarroja ideal durante el funcionamiento real de la cámara termográfica, se recomienda que el usuario realice operaciones de compensación en la cámara termográfica cuando recién la enciende o durante un funcionamiento prolongado.
Método de compensación : el objetivo de compensación puede seleccionar diferentes objetos con temperatura uniforme según el entorno del sitio y las características del objetivo. Luego apunte la imagen térmica hacia el objetivo de compensación uniforme y guarde los datos de la imagen original en este momento como datos de fondo necesarios para la corrección de la falta de uniformidad.
Objetivo de compensación: Objetos con temperatura uniforme; Un cielo limpio y sin nubes; Obturador incorporado de la cámara térmica.
·SDRAM y FLASH
La imagen de fondo recopilada cuando la imagen térmica realiza la compensación, el coeficiente de corrección generado por la corrección de falta de uniformidad, los datos de corrección de píxeles muertos y algunos parámetros de control necesarios para el funcionamiento normal de la máquina, etc., todos estos datos se almacenan en la memoria. almacenamiento FLASH dentro de la máquina. Después de encender la imagen térmica, transfiere automáticamente los datos en FLASH a la memoria SDRAM de la máquina. Los datos cargados en la SDRAM desaparecen automáticamente después de que se apaga la imagen térmica.